Tim sa Pomorskog univerziteta inženjeringa u Vuhanu, Kina, predstavio je revolucionarne algoritme koji ispravljaju inercijalne greške koristeći retke akustične signale, otvarajući novu eru u podvodnoj navigaciji.
Ovo istraživanje nudi novi pristup pitanju podvodne navigacije, gde tradicionalni satelitski sistemi često nisu efikasni zbog nemogućnosti prodora signala kroz vodu. Kroz razvoj dva nova algoritma – RMAN i VLBL – istraživači su postigli značajna poboljšanja u tačnosti i stabilnosti podvodne navigacije.
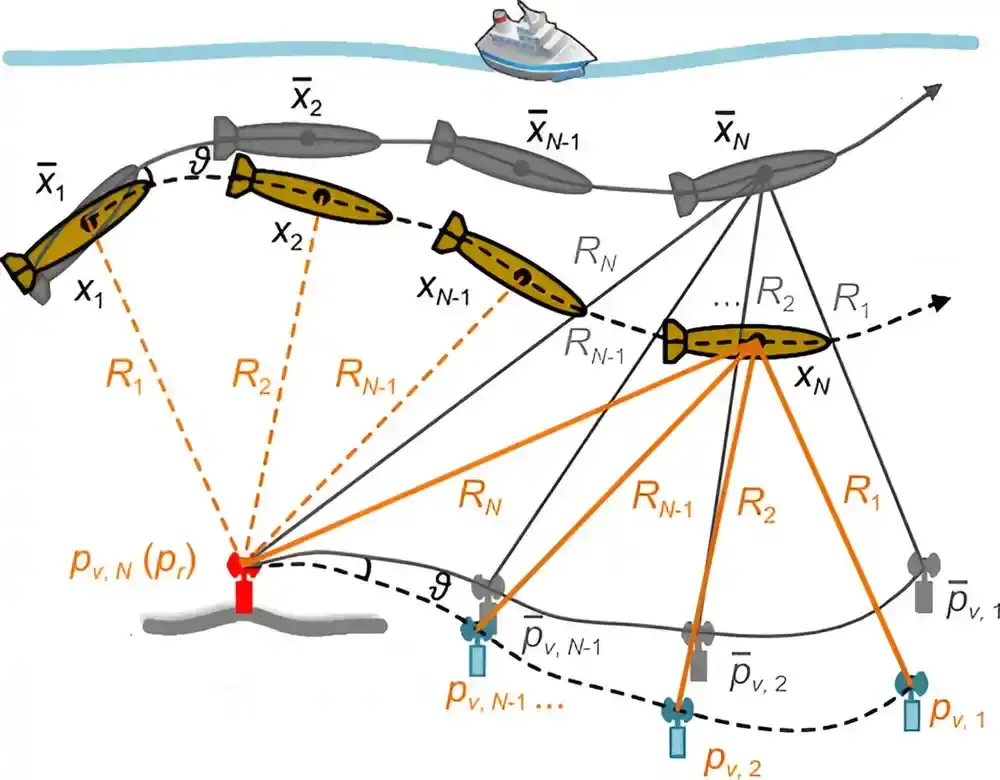
RMAN algoritam, inspirisan navigacijom bez potrebe za referentnim mapama, i VLBL algoritam, prilagođen greškama u inkrementima relativnog položaja, koriste minimalne interakcije sa akustičnim svetionikom kako bi ispravili inercijalne navigacione greške. Kroz opsežne simulacije i terenska ispitivanja, ove metode su demonstrirale smanjenje inercijalne greške za preko 90%, obeležavajući značajan korak napred u odnosu na postojeće sisteme.
Ovi rezultati imaju širok spektar primena, od istraživanja okeana do nadzora životne sredine i odbrambenih operacija, obezbeđujući pouzdanije i efikasnije sredstvo za podvodno pozicioniranje. Vodeći istraživač, Dr Fangneng Li, istakao je da ove tehnike nude promenu paradigme u podvodnoj navigaciji i obećavaju značajno poboljšanje u funkcionalnosti i pouzdanosti podvodnih navigacionih tehnologija.