Roboti su se već pokazali kao obećavajući alati za obavljanje složenih i zahtevnih zadataka održavanja. Dok su inženjeri razvili širok spektar robota koji bi mogli da pomognu u održavanju i popravci infrastrukture, mnogi od ovih robota moraju biti priključeni na eksterne izvore napajanja, što ograničava njihovu primenu u stvarnom svetu.
Istraživači sa Instituta Maks Plank za inteligentne sisteme, Tehnološkog instituta u Harbinu i Univerziteta nauke i tehnologije u Hong Kongu nedavno su razvili novog bežičnog minijaturnog robota koji može da se kreće kroz cevi i druge cevaste strukture bez oslanjanja na spoljne izvore energije. Ovaj robot, predstavljen u radu objavljenom u Science Robotics, mogao bi da pomogne u efikasnom rešavanju složenih problema održavanja uz minimiziranje oštećenja cevi.
„Bežični roboti milimetarske skale koji su sposobni da se kreću kroz cevaste strukture koje teku fluidom imaju značajan potencijal za inspekciju, održavanje ili popravku u nuklearnim, industrijskim i medicinskim aplikacijama“, rekao je Venki Hu, koautor rada, za Tech Ksplore. „Međutim, preovlađujuće oslanjanje na spoljno napajanje ograničava njihov radni domet i primenljiva okruženja.“
Mnogi ranije predloženi bežični roboti za održavanje su veći od svojih kolega koji se oslanjaju na energiju, mogu da rade ograničeno vreme i imaju manje funkcionalnosti. Hu i njegove kolege su krenuli da razviju bežični milirobot koji uključuje unutrašnji izvor napajanja i jedinicu za aktiviranje, koristeći svoju raspoloživu energiju na kontrolisan način.
Ovo bi mu moglo omogućiti da pokrije veće udaljenosti unutar cevastih struktura i da obavlja rutinske zadatke održavanja tokom dužeg vremenskog perioda, bez da ostane bez energije.
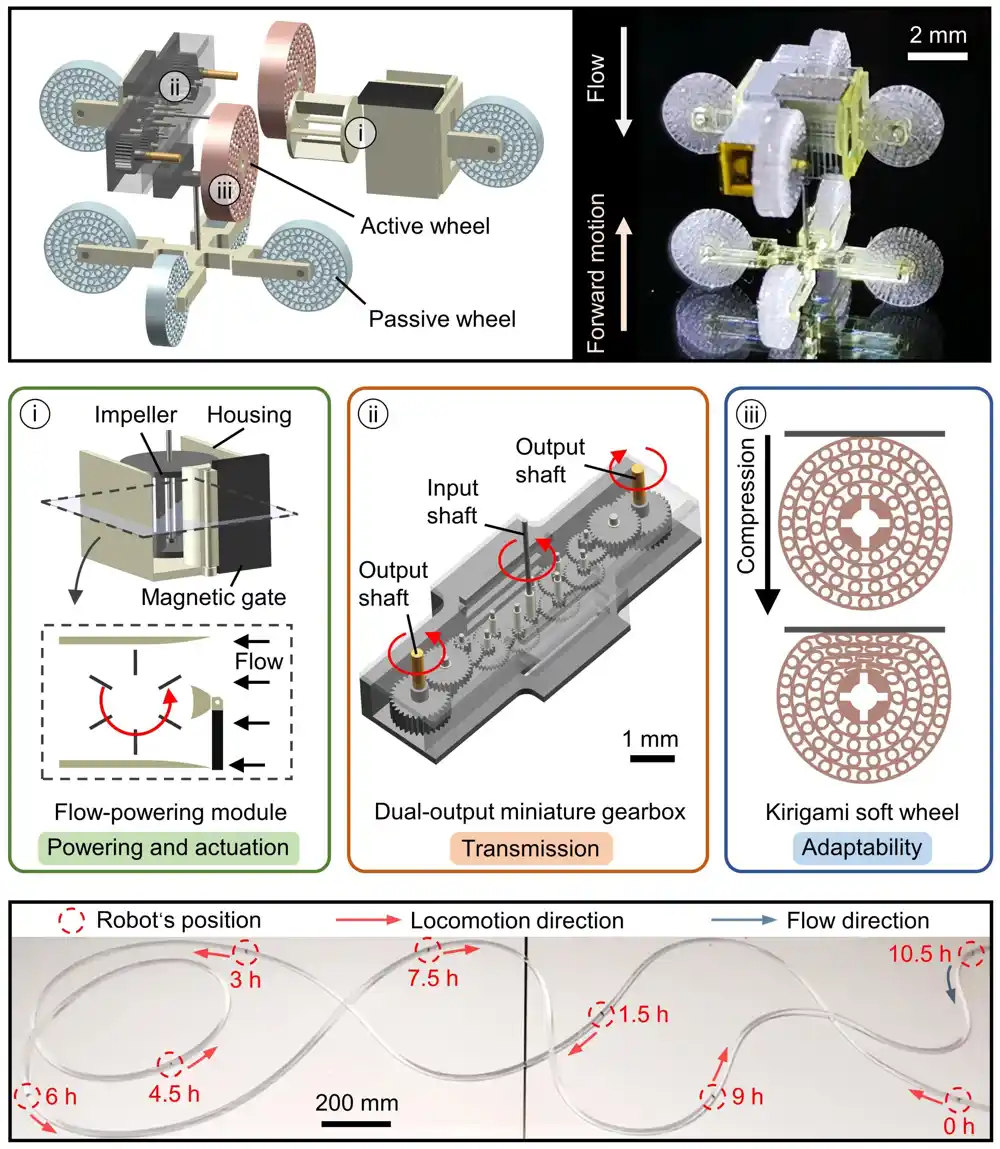
„Naš robot uključuje tri ključne komponente: modul za napajanje protoka za korišćenje snage protoka, minijaturni menjač sa dvostrukim izlazom za prenos pretvorene mehaničke energije u robotov sistem za kretanje i kirigami meke točkove za prilagodljivo kretanje u složenim cevima,“ Hu je objasnio.
„Predloženi cevni milirobot sa protočnim pogonom nudi upravljivu navigaciju uzvodno/nizvodno na velike udaljenosti u složenim cevovodima za različite primene.“
Robot milimetarske skale na točkovima koji su kreirali Hu i njegovi saradnici ima unutrašnje radno kolo koje može da pretvori protok tečnosti u cevastoj strukturi u mehaničku energiju. Štaviše, smer u kome se kreće može se modulisati jednostavno primenom spoljnog magneta.
„Naš robot se bavi potrebama aplikacija koje zahtevaju navigaciju na velikim udaljenostima, kao i sposobnošću da obavljaju dugotrajne zadatke unutar zatvorenih cevastih struktura koje su ispunjene tekućim gasovima ili tečnostima“, rekao je Hu.
Istraživači su procenili svog robota u nizu preliminarnih testova i otkrili da je postigao obećavajuće rezultate. Kao deo svojih narednih studija, planiraju da dodatno unaprede njegove sposobnosti i stabilnost, kako bi olakšali njegovu buduću primenu u realnim okruženjima.
„Trenutno, sila sidrenja koja uravnotežuje otpor protoka koji deluje na telo robota obezbeđuje sila trenja točka“, dodao je Hu.
„Da bi se obezbedila stabilna kretanja u cevima sa visokim protokom (>1 m/s) ili površinama sa malim trenjem poput naftovoda, racionalizacija tela robota kako bi se minimizirao otpor protoka ili dodavanje mikrostruktura na površine točkova za povećanje trenja može biti efikasno.
„Pored toga, prebacivanje statusa kretanja robota je ograničeno radnom razdaljinom spoljnih magnetnih polja. Da bi se ovo rešili, budući roboti će biti opremljeni ugrađenim minijaturizovanim baterijama, aktuatorima (kao što su legure sa memorijom oblika) i mikro-pogon i komunikacionim kolima da omogući daljinsko upravljanje na daljinu“.