Tim robotičara sa Instituta za robotiku i mehatroniku Nemačkog vazduhoplovnog centra otkriva da kombinovanje tradicionalnih unutrašnjih senzora sile i obrtnog momenta sa algoritmima za mašinsko učenje može dati robotima novi način da osete dodir.
U svojoj studiji objavljenoj u časopisu Naučna robotika, grupa je uzela potpuno novi pristup kako bi robotima pružila osećaj dodira koji ne uključuje veštačku kožu.
Za živa bića dodir je dvosmerna ulica; kada dodirnete nešto, osetite njegovu teksturu, temperaturu i druge karakteristike. Ali možete biti i dodirnuti, kao kada neko ili nešto drugo dođe u kontakt sa delom vašeg tela. U ovoj novoj studiji, istraživački tim je pronašao način da oponaša poslednji tip dodira u robotu kombinovanjem unutrašnjih senzora sile i obrtnog momenta sa algoritmom za mašinsko učenje.
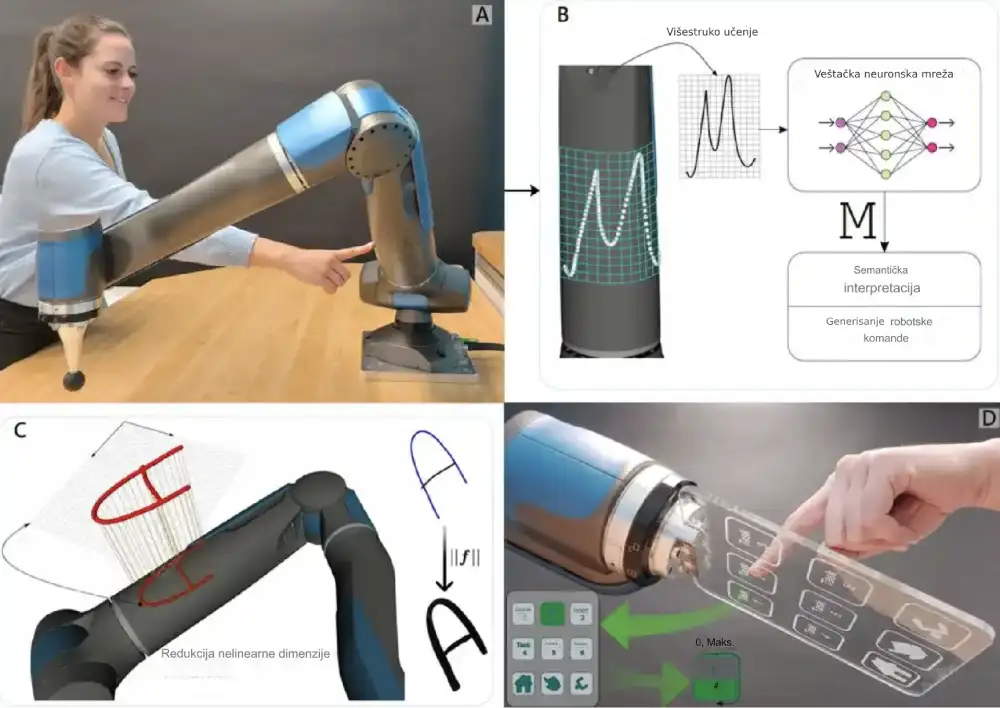
Prepoznajući da veliki deo osećaja dodirivanja dolazi zbog obrtnog momenta (napetost koja se oseća u zglobu, na primer, ako se pritisak primeni na prste), istraživači su postavili ekstra osetljive senzore sile i obrtnog momenta u zglobove ruke robota. Senzori detektuju pritisak koji se primenjuje na ruku koji dolazi iz više pravaca odjednom.
Zatim su koristili aplikaciju za mašinsko učenje kako bi naučili robota kako da tumači različite vrste napetosti. Ovo je omogućilo robotu da prepozna različite tipove scenarija dodira. Robot je mogao da kaže, na primer, kada ga se dodiruje na određenom mestu duž njegove ruke. Takođe je ukinuo potrebu da se ceo robot pokrije veštačkom kožom.
Istraživači su otkrili da je AI aplikacija učinila ruku toliko osetljivom da može da identifikuje koji od brojeva naslikanih na njenoj ruci je pritisnut – ili u drugom slučaju, da identifikuje brojeve koje je na njenoj ruci nacrtala osoba vrhom prsta.
Ovaj pristup bi mogao da otvori nove načine za interakciju sa mnogim vrstama robota, posebno onima koji se koriste u industrijskim okruženjima u bliskoj saradnji sa ljudskim saputnicima.


