Većina životinja može brzo da pređe sa hodanja na skakanje do puzanja do plivanja ako je potrebno bez rekonfigurisanja ili velikih prilagođavanja.
Većina robota ne može. Ali istraživači sa Univerziteta Carnegie Mellon stvorili su mekane robote koji mogu neprimetno da se prebace sa hodanja na plivanje, na primer, ili puzanja na kotrljanje.
„Bili smo inspirisani prirodom da razvijemo robota koji može da obavlja različite zadatke i da se prilagođava svom okruženju bez dodavanja aktuatora ili složenosti“, rekao je Dinesh K. Patel, postdoktorski saradnik u Morphing Matter Lab u Školi računarskih nauka Human -Institut za računarsku interakciju. „Naš bistabilni aktuator je jednostavan, stabilan i izdržljiv, i postavlja osnovu za budući rad na dinamičkoj, rekonfigurabilnoj mekoj robotici.
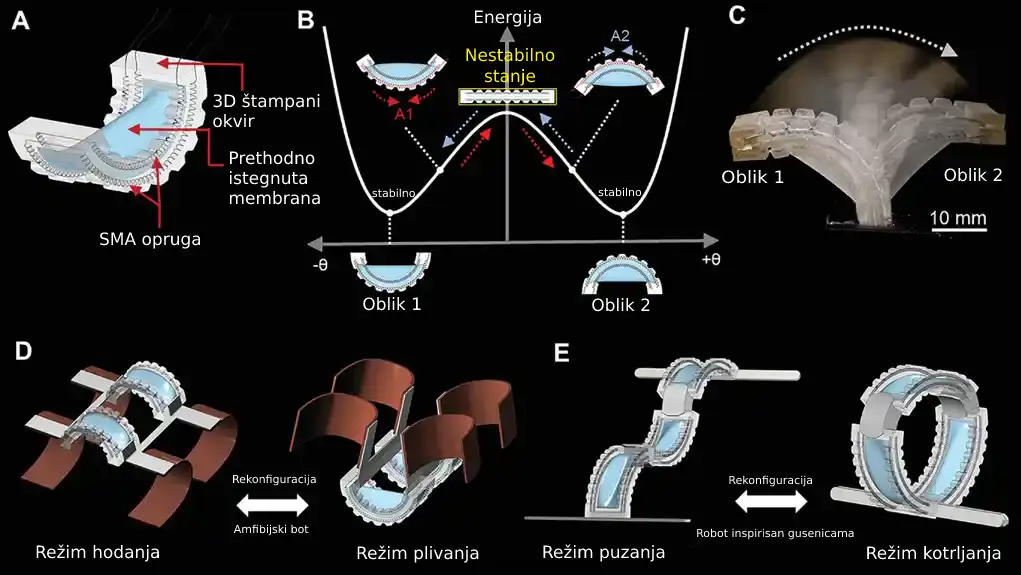
Bistabilni aktuator je napravljen od 3D štampane meke gume koja sadrži opruge od legure sa pamćenjem oblika koje reaguju na električne struje skupljanjem, što uzrokuje savijanje aktuatora. Tim je koristio ovo bistabilno kretanje da promeni oblik aktuatora ili robota. Jednom kada robot promeni oblik, on je stabilan sve dok ga drugi električni naboj ne vrati u prethodnu konfiguraciju.
„Uparivanje načina na koji životinje prelaze sa hodanja na plivanje, puzanja i skakanja je veliki izazov za bio-inspirisanu i meku robotiku“, rekao je Carmel Majidi, profesor na odseku za mašinstvo na CMU-ovom koledžu za inženjering.
Na primer, jedan robot koji je tim napravio ima četiri zakrivljena aktuatora pričvršćena za uglove tela veličine mobilnog telefona napravljenog od dva bistabilna aktuatora. Na kopnu, zakrivljeni aktuatori deluju kao noge, omogućavajući robotu da hoda. U vodi, bistabilni aktuatori menjaju oblik robota, stavljajući zakrivljene aktuatore u idealnu poziciju da deluju kao propeleri tako da može da pliva.
„Morate imati noge da biste hodali po kopnu, i morate imati propeler da plivate u vodi. Izgradnja robota sa zasebnim sistemima dizajniranim za svako okruženje dodaje složenost i težinu“, rekao je Ksiaonan Huang, docent robotike u Univerzitet u Mičigenu i Majidijev bivši dr. učenik. „Koristimo isti sistem za oba okruženja da bismo stvorili efikasnog robota.“
Tim je napravio još dva robota: jednog koji može da puzi i skače, a drugog inspirisan gusenicama i bubama koje mogu da puze i kotrljaju se.
Aktuatorima je potrebno samo sto milisekundi električnog naboja da bi promenili svoj oblik i oni su izdržljivi. Tim je naterao osobu da se provoza biciklom preko jednog od aktuatora nekoliko puta i promenio je oblike svojih robota stotinama puta kako bi demonstrirao izdržljivost.
U budućnosti, roboti bi mogli da se koriste u situacijama spasavanja ili za interakciju sa morskim životinjama ili koralima. Korišćenje opruga aktiviranih toplotom u aktuatorima moglo bi da otvori aplikacije u nadgledanju životne sredine, haptici i rekonfigurabilnoj elektronici i komunikaciji.
„Postoji mnogo zanimljivih i uzbudljivih scenarija u kojima bi energetski efikasni i svestrani roboti poput ovog mogli biti korisni“, rekao je Lining Iao, Cooper-Siegel docent u HCII i šef laboratorije Morphing Matter.
Istraživanje tima je predstavljeno na naslovnoj strani izdanja Advanced Materials Technologies iz januara 2023.