HBP istraživači sa Instituta za biofiziku Nacionalnog istraživačkog saveta (IBF-CNR) u Palermu, Italija, oponašali su neuronsku arhitekturu i veze hipokampusa mozga kako bi razvili robotsku platformu sposobnu da uči kao ljudi.
Simulirani hipokampus je u stanju da menja sopstvene sinaptičke veze dok pomera virtuelnog robota nalik automobilu. Ono što je najvažnije, to znači da treba da se navigira do određenog odredišta samo jednom da bi mogao da zapamti putanju. Ovo je značajno poboljšanje u odnosu na trenutne metode autonomne navigacije koje se oslanjaju na duboko učenje i koje umesto toga moraju da izračunaju hiljade mogućih putanja.
„Postoje i drugi sistemi za navigaciju koji simuliraju ulogu hipokampusa, koji deluje kao radna memorija za mozak. Međutim, ovo je prvi put da smo u mogućnosti da oponašamo ne samo ulogu već i arhitekturu hipokampusa, sve do pojedinačni neuroni i njihove veze“, objašnjavaju Michele Migliore i Simone Coppolino iz IBF-CNR, koji su svoje nalaze objavili u časopisu Neural Networks.
„Izgradili smo ga koristeći njegove osnovne građevne blokove i karakteristike poznate u literaturi – kao što su neuroni koji kodiraju objekte, specifične veze i sinaptičku plastičnost. Uzimajući inspiraciju iz biologije, istraživači su bili u mogućnosti da koriste različite skupove pravila za navigaciju od onih koje koriste platforme vođene dubokim učenjem.
Da bi stigao do određene destinacije, sistem dubokog učenja izračunava moguće putanje na mapi i dodeljuje im troškove, na kraju birajući najjeftiniji put koji treba pratiti. Efikasno se zasniva na pokušajima i greškama i zahteva opsežne proračune: decenije studija posvećene su smanjenju količine posla za sistem.
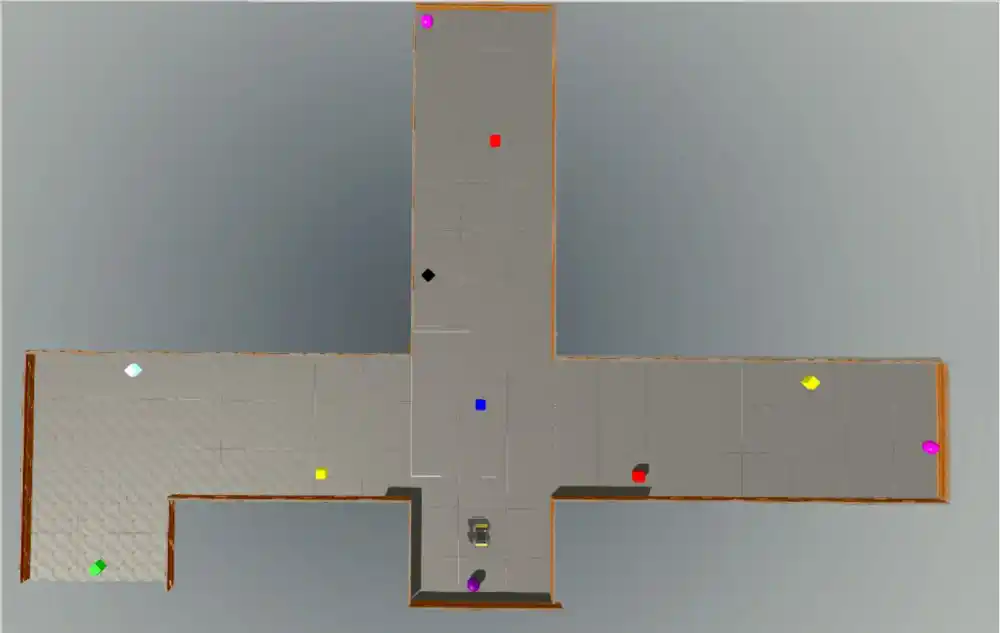
„Naš sistem, naprotiv, svoj proračun zasniva na onome što može aktivno da vidi kroz svoju kameru“, objašnjavaju istraživači. „Kada se kreće koridorom u obliku slova T, proverava relativnu poziciju ključnih orijentira (u ovom slučaju obojenih kockica). U početku se kreće nasumično, ali kada je u mogućnosti da stigne do svog odredišta, rekonstruiše mapu preuređujući neurone u svoj simulirani hipokampus i dodeljuje ih orijentirima. Potrebno je samo jednom da prođe kroz obuku da bi mogao da zapamti kako da stigne do odredišta.“
Ovo je više slično načinu na koji se ljudi i životinje kreću – kada posetite muzej, prvo lutate po mestu, ne znajući put, ali ako se onda morate vratiti na određenu izložbu, odmah se sećate svih potrebnih koraka. I robotska platforma i simulacija hipokampusa su prvo implementirane kroz digitalnu istraživačku infrastrukturu EBRAINS, što je potom omogućilo istraživačima da naprave i testiraju fizičkog robota u pravom hodniku.
„Prepoznavanje objekata bilo je zasnovano na vizuelnom unosu kroz robotovu kameru, ali bi se u teoriji moglo kalibrisati na osnovu zvuka, mirisa ili kretanja: važan deo je biološki inspirisan skup pravila za navigaciju, koji se lako može prilagoditi različitim okruženjima i ulazima.“
Drugi član Miglioreove laboratorije, Giuseppe Giacopelli, trenutno radi na tome da sistem bude prilagođen za industrijsku upotrebu kodiranjem za prepoznavanje specifičnih oblika. „Robot koji radi u skladištu mogao bi da se kalibriše i da zapamti položaj polica za samo nekoliko sati“, kaže Migliore. „Druga mogućnost je pomaganje slabovidima, pamćenje domaćeg okruženja i djelovanje kao robotski pas vodič.“


