Istraživači sa Meta AI, Univerziteta Stanford, Technische, Universitat Dresden i Nemačkog centra za istraživanje raka (DFKZ) nedavno su razvili DIGIT Pinki, senzor minijaturne veličine koji može da detektuje taktilne informacije. Ovaj senzor, predstavljen u radu objavljenom na serveru za preprint arKsiv, mogao bi biti integrisan u nove medicinske tehnologije i robotske sisteme.
„Ovaj rad je započeo istraživačkim stažom u Meta AI sa Robertom Calandrom i Mikeom Lambetom, ali je na kraju prerastao u istraživačku saradnju između Meta, Univerziteta Stanford, Technische Universitat Dresden i Nemačkog centra za istraživanje raka (DFKZ)“, Julia Di, koautor rada, rekao je Tech Xplore.
„Primarno smo zainteresovani za nauku digitalizacije dodira za robote. Sa DIGIT Pinkijem, želeli smo da istražimo kako da napravimo senzore koji imaju dodirne sposobnosti slične onima kod ljudi, ali u obliku faktora ljudskog prsta.“
DIGIT Pinki, senzor koji su kreirali Di i njene kolege, nadovezuje se na dizajn taktilnih senzora predstavljen poslednjih godina, kao što su DIGIT i OmniTact senzori. Međutim, da bi kreirali svoj uređaj, Di i njene kolege su se takođe vratile na starije dizajnerske ideje uvedene 1980-ih, uključujući i one koje je izneo S. Begej u osnovnom radu.
„DIGIT Pinki je tip taktilnog senzora zasnovanog na viziji koji koristi slike sa minijaturne kamere da bi dobio osećaj dodira“, objasnio je Di. „Obično se ove vrste senzora sastoje od optički čistog vrha prstiju od gela. Kada ovi vrhovi prstiju od gela dodirnu objekat ili okolinu, unutrašnja kamera sa svetlima će snimiti nastale deformacije u gelu.“
Istraživači su obučili algoritam mašinskog učenja o deformacijama gela senzora, nastalih kada senzor stupi u kontakt sa objektom. Obučeni algoritam može precizno da nauči taktilne informacije, kao što su kontaktne sile sa objektom, iz podataka o slici koje je prikupio senzor. Ove taktilne informacije bi zatim mogao da koristi robot ili uređaj za obavljanje zadataka manipulacije.
„Naša inovacija je bila da smanjimo senzore korišćenjem snopova optičkih vlakana za prenošenje slike na udaljenu kameru, slično tome kako su rani endoskopi koristili snopove optičkih vlakana za snimanje“, rekao je Di. „Udaljavanjem elektronike od vrha prsta sa gelom, mogli bismo značajno da smanjimo vrh prsta sa gelom. Jedna od prednosti ovog dizajna je da je vrh prsta sa gelom nemagnetičan i ne sadrži elektroniku, što je blagodat za sve zadatke u medicinskim aplikacijama kao što je unutar tela ili u aparatu za magnetnu rezonancu.“
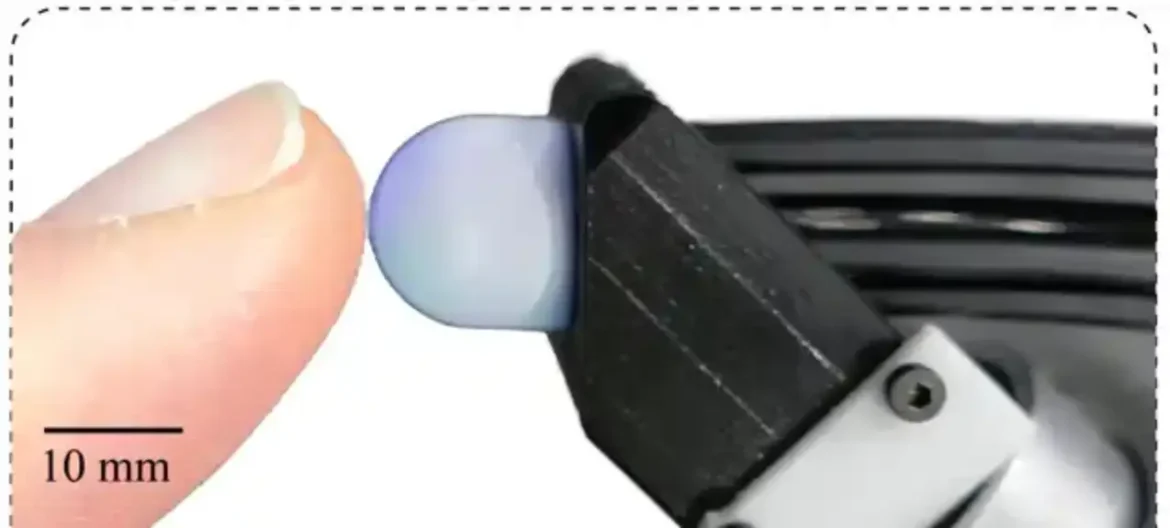
Nedavni rad ovog tima istraživača pokazuje izvodljivost minijaturizacije taktilnih senzora zasnovanih na viziji koristeći snopove optičkih vlakana. Prateći njihov predloženi dizajn, Di i njene kolege su kreirale prototip senzora sa prečnikom vrha od 15 milimetara, što je otprilike prosečna veličina vrha kažiprsta žene ili veličina donjih 5% muškog kažiprsta.
Važno je napomenuti da je ovaj veštački vrh prsta sa senzorom napravljen od silikona i ne sadrži osetljive elektronske ili magnetne komponente. To znači da se može bezbedno uvesti u ljudsko telo i stoga može biti privlačan za medicinsku primenu.
„Jedna stvarna aplikacija za tanak, osetljiv senzor je dijagnostika raka u ograničenim prostorima – na primer, digitalna palpacija u rutinskim rektalnim ili cervikalnim pregledima“, objasnio je Di. „Pošto su čvorovi raka malo čvršći od zdravog tkiva, kliničari mogu osetiti kancerogene izrasline vrhovima prstiju kao dijagnostičku metodu.
„U radu predstavljamo preliminarne rezultate koji pokazuju da DIGIT Pinki razlikuje zdravo i nezdravo tkivo na fantomima medicinskog kvaliteta (simulacije stvarnog tkiva) i ek vivo posteriornom tkivu prostate (deo prostate koji bi se osetio tokom kliničkog pregleda). ).“
Rezultati preliminarnih testova tima sugerišu da bi DIGIT Pinki mogao da se koristi za razvoj novih medicinskih tehnologija, uključujući uređaje koji mogu da otkriju abnormalnosti tkiva unutar ljudskog tela. Pored toga, senzor bi se mogao koristiti za razvoj novih robotskih sistema, kao što su tanki i osetljivi veštački vrhovi prstiju koji omogućavaju robotima da manipulišu objektima sa većom spretnošću, pa čak i da koriste makaze ili druge alate koji zahtevaju primenu kontrolisanih sila na ograničenu lokaciju.
„U neposrednoj budućnosti radimo na proširenju ove tehnologije za druge medicinske primene, na primer, za palpaciju grlića materice“, dodao je Di. „Bilo bi uzbudljivo imati ove vrste veoma osetljivih vrhova prstiju i na protetskim rukama. Takođe smo zainteresovani da otkrijemo kako da koristimo veštačku inteligenciju za tumačenje signala dodira za manipulaciju.“