U medicini budućnosti, sićušni roboti će se samostalno kretati kroz tkivo, a medicinski instrumenti će pokazivati njihov položaj unutar tela tokom operacije. Oba zahtevaju od lekara da budu u stanju da precizno i u realnom vremenu lokalizuju i kontrolišu uređaje.
Do sada nije bilo odgovarajućeg metoda za ovo. Naučnici iz Nemačkog centra za istraživanje raka (DKFZ) sada su opisali metod signalizacije zasnovan na oscilirajućem magnetu koji može značajno poboljšati takve medicinske primene.
Studija je objavljena u časopisu npj Robotics.
Ono što je donedavno zvučalo kao naučna fantastika sada je uznapredovalo u razvoju: očekuje se da nanoroboti koji se kreću nezavisno kroz telo transportuju lekove, mere u tkivu ili obavljaju hirurške procedure. Već su razvijeni nanoroboti na magnetni pogon koji se kreću kroz mišiće, kroz staklasto telo oka ili kroz sistem krvnih sudova.
Međutim, postoji nedostatak sofisticiranih sistema za praćenje i kontrolu aktivnosti robota duboko u telu u realnom vremenu. Tradicionalne tehnike snimanja su prikladne samo u ograničenoj meri. Magnetna rezonanca (MRI) je ograničena u vremenskoj rezoluciji, kompjuterska tomografija (CT) je povezana sa izlaganjem zračenju, a snažno rasipanje zvučnih talasa ograničava lokalnu rezoluciju ultrazvuka.
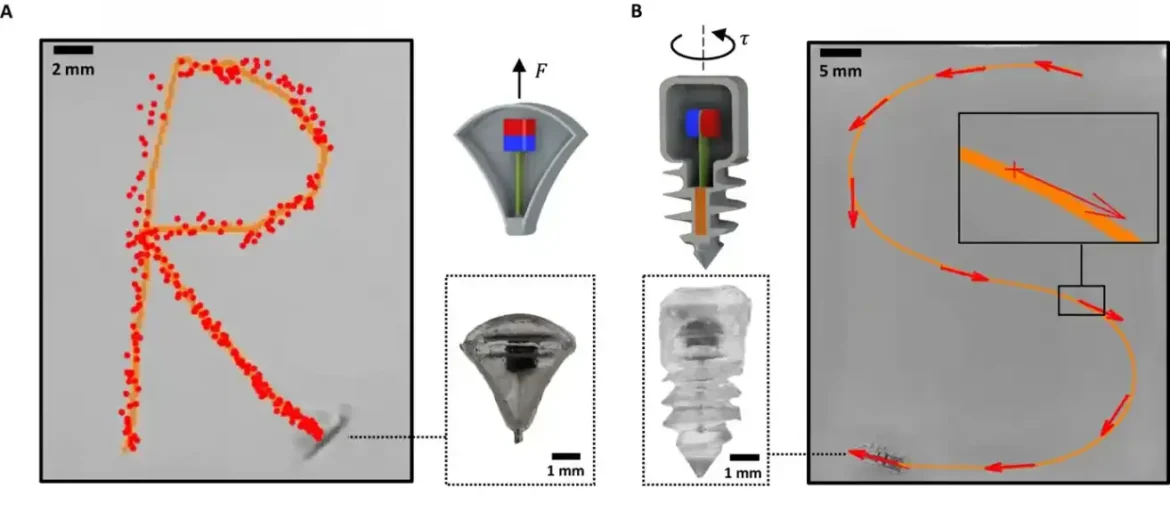
Tim predvođen Tian Kiuom sa DKFZ-a u Drezdenu je sada izmislio novu metodu za rešavanje ovog problema. Mali uređaj koji su razvili zasniva se na magnetnom oscilatoru (tj. mehanički oscilirajući magnet koji se nalazi u kućištu veličine milimetra). Spoljno magnetno polje može podstaći magnet da vibrira mehanički.
Kada se oscilacija ponovo smanji, ovaj signal se može snimiti magnetnim senzorima. Osnovni princip je uporediv sa nuklearnom magnetnom rezonancom u MRI. Istraživači ovu metodu nazivaju „magneto-oscilatorna lokalizacija male veličine“ (SMOL).
SMOL omogućava određivanje položaja i orijentacije malog uređaja na velikoj udaljenosti (preko 10 cm), veoma precizno (manje od 1 mm) iu realnom vremenu. Za razliku od metoda praćenja zasnovanih na statičkim magnetima, SMOL može detektovati pokrete u svih šest stepeni slobode i sa znatno višim kvalitetom signala.
Pošto je uređaj zasnovan na slabim magnetnim poljima, bezopasan je za telo, bežični i kompatibilan sa mnogim konvencionalnim uređajima i tehnikama snimanja.
„Postoji mnogo mogućih primena za SMOL metod“, kaže Feliks Fišer, prvi autor trenutne publikacije. „Već smo integrisali sistem u minijaturne robote i instrumente za minimalno invazivnu hirurgiju.
„Kombinacija sa endoskopima kapsule ili obeležavanje tumorskog tkiva za veoma preciznu radioterapiju bila bi zamisliva. Naš metod bi takođe mogao da pruži odlučujuću prednost za potpuno automatizovanu hiruršku robotiku ili aplikacije proširene stvarnosti.“
„SMOL zahteva samo relativno jednostavnu tehničku opremu. Zbog svojih dimenzija u milimetarskom opsegu, oscilator se može integrisati u mnoge postojeće instrumente, a još uvek postoji potencijal za dalju minijaturizaciju. Zahvaljujući preciznoj prostornoj i vremenskoj rezoluciji, naša tehnika ima potencijal da značajno unapredi mnoge medicinske procedure budućnosti“, komentariše Kiu, stariji autor trenutne publikacije.


