Da bi se najbolje kretali u svom okruženju i rešavali svakodnevne zadatke, roboti bi trebalo da budu u stanju da izvode složene pokrete, efikasno koordinirajući kretanje pojedinačnih udova. Robotičari i kompjuterski naučnici stoga pokušavaju da razviju računarske tehnike koje mogu veštački da repliciraju proces kroz koji ljudi planiraju, izvode i koordiniraju pokrete različitih delova tela.
Istraživačka grupa sa sedištem u Intel Labs (Nemačka), Univerzitetskom koledžu u Londonu (UCL, UK) i VERSES Research Lab (SAD) nedavno je krenula da istražuje kontrolu motora autonomnih robota koristeći hijerarhijske generativne modele, računarske tehnike koje organizuju varijable u podacima u različite nivoe ili hijerarhije, da bi potom oponašali specifične procese.
Njihov rad, objavljen u Nature Machine Intelligence, pokazuje efikasnost ovih modela za omogućavanje kontrole motora inspirisane ljudima u autonomnim robotima.
„Naš nedavni rad istražuje kako možemo da crpimo inspiraciju iz biološke inteligencije da formalizujemo učenje i kontrolu robota“, rekao je Zhibin (Alek) Li, odgovarajući autor rada, za Tech Ksplore.
„Ovo omogućava prirodno planiranje pokreta i preciznu kontrolu pokreta robota unutar koherentnog okvira. Verujemo da evolucija motoričke inteligencije nije slučajna kombinacija različitih sposobnosti. Struktura našeg vidnog korteksa, jezičkog korteksa, motornog korteksa i tako dalje, ima dublji i strukturalno mudar razlog zašto takav mehanizam za povezivanje različitih neuronskih puteva može da funkcioniše efikasno i efikasno.“
Nedavna studija vanrednog profesora Zhibina (Alek) Lija i uglednog neuronaučnika profesora Karla Fristona FMedSci FRSB FRS crpi inspiraciju iz istraživanja neuronauke, posebno onoga što je trenutno poznato o biološkoj inteligenciji i kontroli motora kod ljudi. Koristeći ljudski mozak kao referencu, tim je razvio softver, mašinsko učenje i algoritme upravljanja koji bi mogli da poboljšaju sposobnost autonomnih pametnih robota da pouzdano obavljaju složene dnevne zadatke.
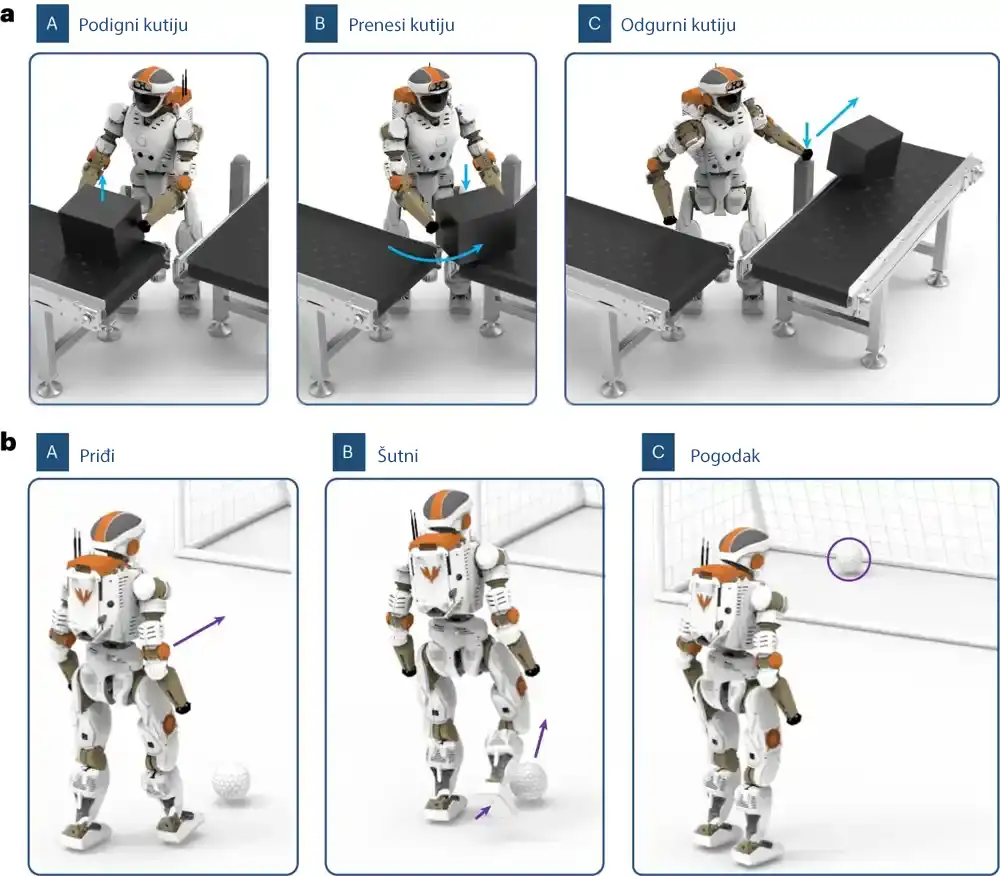
„U ovom radu smo to demonstrirali našom opsežnom simulacijom, gde humanoidni robot celog tela može da transportuje kutije, otvara vrata, upravlja objektima (npr. pokretnim trakama) u okviru skladišta, igra fudbal, pa čak i nastavi sa radom. pod fizičkim oštećenjem tela robota“, rekao je Li. „Naša studija pokazuje moć prirode gde inspiracija kako različiti korteksi rade zajedno u našem mozgu može pomoći u dizajnu mozga pametnih robota.
Kao i drugi hijerarhijski generativni modeli, tehnika koju su razvili Li i njegove kolege funkcioniše organizovanjem zadatka u različite nivoe ili hijerarhije. Konkretno, model tima preslikava sveobuhvatni cilj zadatka na izvođenje pojedinačnih pokreta udova u različitim vremenskim skalama.
„Generativni modeli predviđaju posledice različitih akcija, pomažući na taj način da se reše različiti tipovi/nivoi planiranja i pravilno mapiraju različite akcije robota, što je prilično teško i zamorno uraditi“, objasnio je Li.
„Na primer, nošenje kutije sa jednog mesta na drugo će se prirodno mapirati u globalni i grubi plan hoda ka odredištu, zajedno sa pažljivijim praćenjem i finom kontrolom ravnoteže, kao i nošenjem kutija i postavljanjem kutija—sve ova složena koordinacija će se odvijati prirodno u isto vreme koristeći naš softver.“
Istraživači su procenili svoj pristup u nizu simulacija i otkrili da je omogućio humanoidnom robotu da autonomno završi složen zadatak koji podrazumeva kombinaciju radnji, uključujući hodanje, hvatanje predmeta i manipulaciju njima. Konkretno, robot bi mogao da preuzme i transportuje kutiju dok otvara i prolazi kroz vrata i izbacuje loptu.
„Jedan od najznačajnijih nalaza našeg nedavnog rada je da uzimanje inspiracije iz prirode može biti veoma dobra polazna tačka“, rekao je Li.
„Možemo dobiti inspiraciju na organizacionom nivou sličnosti našeg mozga i voditi naš dizajn mozga robota, umesto da započnemo inženjerski dizajn od nule. Postoji prilična količina inženjerskog rada koji je izmišljen nezavisno od bioinspirisanog pristupi, a ipak, još uvek nemamo inteligentne robote koji bi mogli pametno da obavljaju poslove poput nas, koristeći samo malo energije, kao što je potrošnja hleba i vode. Umesto toga, u današnje vreme roboti koriste ogromnu snagu i računare da rade jednostavne stvari.“
Početni nalazi koje su Li i njegove kolege prikupili su veoma obećavajući, ističući potencijal hijerarhijskih generativnih modela za prenošenje ljudskih sposobnosti na robote. Budući eksperimenti na širokom spektru fizičkih robota mogli bi pomoći da se ovi rezultati dodatno potvrde.
„U ovom trenutku ljudske istorije, zajedno smo uradili ogroman posao na repliciranju različitih vrsta inteligencije na ljudskom nivou odvojeno koja je ekvivalentna različitim delovima ljudskog mozga“, dodao je Li. „Sada možemo crpiti inspiraciju iz biološkog mozga u smislu strukture i organizacionog nivoa funkcionalnosti u vezi sa načinom na koji se različiti korteksi međusobno koordiniraju. Zatim možemo dizajnirati veštački mozak na osnovu toga kako ljudski mozak funkcioniše na funkcionalnom nivou.“
Nedavni rad ovog tima istraživača doprinosi stalnim naporima Embodied AI koji imaju za cilj da približe sposobnosti robota sposobnostima ljudi. Li i njegove kolege planiraju da nastave sa primenom svog predloženog pristupa za stvarne motoričke veštine robota za složene zadatke i maksimiziranje njegovog društvenog potencijala.
„Ova studija nas vodi ka održivom putu ka izgradnji AGI (veštačke opšte inteligencije) sa otelotvorenim fizičkim robotima i sposobnostima kao novim oblikom proizvodnih snaga koje mogu da dovedu našu civilizaciju ka svetlijoj budućnosti, pod dobrom i pozitivnom upravom društva i naučne zajednice“, dodao je Li. „U našim narednim studijama nastavićemo da radimo na ispunjavanju ove ambicije.


