Većina rovera je napravljena za Mars, a svaki od njih je složena mašina dizajnirana sa specifičnim ciljevima i terenima na umu. Ali Mesec je drugačiji od Marsa. Mi tamo ne tražimo život; pokušavamo da uspostavimo prisustvo.
U znak priznanja razlike, ESA razvija modularne rovere koji mogu zadovoljiti različite potrebe uz samo male modifikacije.
Zove se Evropski sistem lunarnog rovera (EMRS), a njegov cilj je da „razvije svestrano rešenje za površinsku mobilnost za buduće lunarne misije“, prema novoobjavljenim radovima. Sistemi za površinsku mobilnost služiće četiri predstojeće misije ESA: Polar Ekplorer (PE), In-Situ korišćenje resursa (ISRU), Astrofizička Lunarna opservatorija (ALO) i Lunarna geološka istraživačka misija (LGEM).
Svaka od četiri misije ima specifične zahteve, uključujući postavljanje naučnih instrumenata na južni pol Meseca, iskopavanje i transport preko 200 kg (440 lbs) regolita, izgradnju astrofizičke opservatorije na suprotnoj strani Meseca i proučavanje mesečeve vulkanske istorije . ESA razvija rover koji koristi modularnost da ispuni svaki cilj, a ne potpuno drugačiji rover.
„Da bi se to postiglo, usvojen je modularni pristup za dizajn platforme u smislu lokomocije i mobilnosti, koji uključuje autonomiju na brodu“, objašnjava list.
Postoje očigledne prednosti modularnosti i njenog izdanka, redundancije. Modularna korisna opterećenja mogu se koristiti povoljnije za specifičnu misiju. Takođe se mogu ukloniti i dodati po potrebi i manje vremena oduzimaju za rad i razvoj. A ako je jedan rover iz nekog razloga van funkcije, nosivost se može zameniti u skladu sa promenom prioriteta.
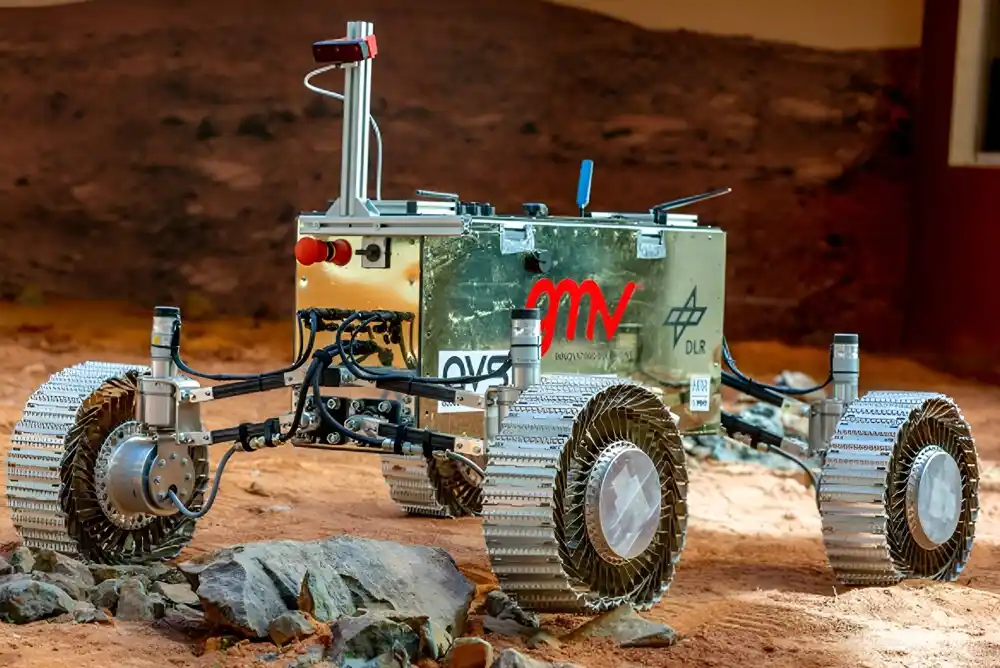
Kada je u pitanju mobilnost, novi roveri će se oslanjati na prilagodljive točkove za istraživanje (AVE) koje je dizajnirala Hellenic Technologi of Robotics (HTR). „Rover točkovi igraju ključnu ulogu, posebno imajući u vidu izazovne uslove na površini Meseca i regolit“, navodi list. Na Mesecu ima dosta rastresitog peska, a AVE će obezbediti dovoljno vuče. Točkovi imaju gusenice na vrhu opruga i fiksnu unutrašnju glavčinu. Ovi točkovi su izuzetno fleksibilni i biće dovoljno čvrsti da ispune zahteve misije, uključujući i izradu od materijala koji mogu da podnesu divlje promene temperature na površini Meseca.
Četiri točka rovera su samo deo dizajna mobilnosti. Upravljački sistem je jednako važan. Postoje dva potencijalna dizajna upravljačkog sistema: upravljanje na vrhu i upravljanje sa strane. ESA je odabrala bočno upravljanje delimično zato što je kompatibilnije sa zapreminom gornjeg prostora za teret.
Bočno upravljanje omogućava četiri različita režima okretanja: Skid Steering, Ackermann Turn, Crab Turn i Point Turn.
Sistem vešanja će biti hibrid pasivnog i aktivnog, sa nezavisnim ogibljenjem za svaki točak. „Nezavisno, aktivno ogibljenje omogućava režim hodanja po točkovima, a zajedno sa nezavisnim upravljanjem čak i režim „veslanja“,“ navodi se u radu. Režim veslanja pruža zaštitu u slučaju da se rover zaglavi na veoma mekom terenu. Zaglavljivanje u mekom tlu je jedan od najizazovnijih scenarija za konvencionalne pasivne sisteme oslanjanja.
Dizajn vešanja takođe omogućava uskladištenu konfiguraciju rovera tokom svemirskog leta.
Kada je u pitanju šasija modularnog rovera, dizajnerski tim predlaže snažan i lagan dizajn polimera ojačanog karbonskim vlaknima (CFRP). Šasija će imati četiri odvojena ležišta. Primarni odeljak je uobičajen među svim roverima i u njemu će se nalaziti zajednička avionika, sistemi termalne kontrole i energetske komponente. Takođe će postojati dva bočna i jedan gornji odeljak, svi mogu da drže različite nosivosti.
Rover će imati ugrađeni softver (OBSV) koji će mu omogućiti da vozi autonomno. Moći će da otkrije i identifikuje različite prepreke i objekte i odredi svoj put kroz njih, oko njih ili preko njih. „Takođe ima mogućnosti manipulacije, što mu omogućava da obavlja zadatke ISRU-a, manipuliše alatima i naučno uzorkovanje“, navodi se u dokumentu. Vreme astronauta je dragoceno, i što roveri mogu biti autonomniji, to će astronauti imati više vremena za druge zadatke.
U radu se ističe da modularnost rovera počinje da se isplati mnogo pre nego što se rover ikada postavi. „Modularni dizajn našeg prototipa pruža jedinstvenu prednost omogućavajući nam da procenimo kretanje i softver rovera u tandemu sa različitim naučnim nosivostima“, navodi se. To je izuzetno vredno pošto se nosivost može na različite načine sastojati od stvari kao što su bušilice, noževi buldožera, spektrometri i kamere.
Modularni dizajn rovera je još uvek u fazi koncepta, iako su probni modeli napravljeni i testirani.
„Izvršen je niz rigoroznih testova na preprekama i iskopima, koji su rasvetlili izuzetne mogućnosti konfiguracije sistema EMRS“, navodi se u dokumentu. „Ovi testovi ne samo da pokazuju sposobnost rovera da bezbedno upravlja lunarnim terenom, već i naglašavaju njegovu stručnost u iskopavanju lunarnog regolita.“
ESA razvija neke ambiciozne planove ne samo za istraživanje Meseca, već i za trajno prisustvo ljudi na Mesecu. Roveri će biti radni konj za ove aktivnosti, a modularni dizajn bi trebao roverima dati prednost.
Saznaćemo za nekoliko godina kada ESA sleti na Mesec.


