Robotski protetski gležnjevi koji se kontrolišu nervnim impulsima omogućavaju amputirancima da se kreću „prirodnije“, poboljšavajući njihovu stabilnost, prema novoj studiji Državnog univerziteta Severne Karoline i Univerziteta Severne Karoline u Čepel Hilu.
„Ovaj rad se fokusirao na ‘posturalnu kontrolu’, što je iznenađujuće komplikovano“, kaže Helen Huang, dopisni autor studije i ugledni profesor porodice Džekson na Zajedničkom odeljenju za biomedicinsko inženjerstvo u NC State i UNC.
„U suštini, kada stojimo u mestu, naša tela se konstantno prilagođavaju kako bismo bili stabilni. Na primer, ako se neko naleti na nas kada stojimo u redu, naše noge prave širok spektar pokreta koji mi nismo čak nužno svesni da bi nas držali uspravno“.
„Radimo sa ljudima koji imaju amputacije donjih ekstremiteta i oni nam kažu da je postizanje ove vrste stabilnosti sa protetskim uređajima značajan izazov. I ova studija pokazuje da su robotski protetski zglobovi koji se kontrolišu pomoću elektromiografskih (EMG) signala izuzetno dobri u omogućavajući korisnicima da postignu ovu prirodnu stabilnost.“ EMG signali su električni signali snimljeni iz mišića pojedinca.
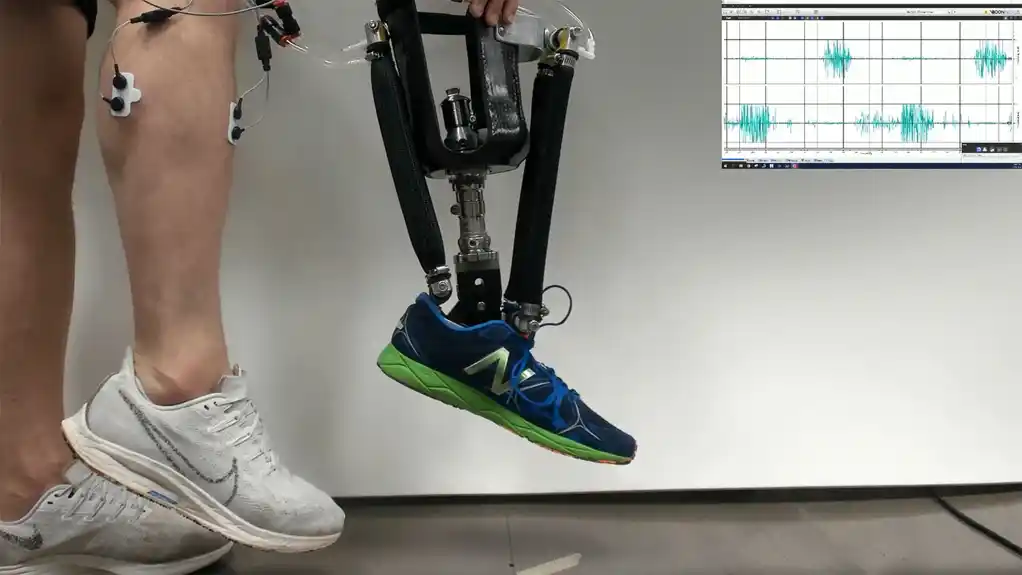
Rad o studiji „Kontrola neuronske proteze vraća skoro normativnu neuromehaniku u kontroli postojanog položaja“ objavljen je u časopisu Science Robotics. Koautor rada je Ventao Liu, Ph.D. student Zajedničkog odseka za biomedicinsko inženjerstvo. Primer učesnika koji reaguje na očekivanu perturbaciju gde su gurnuti unazad. Kada koristi svoj svakodnevni uređaj, pojedincu je potreban korak kao odgovor na smetnju, međutim korišćenjem neuralne kontrolisane proteze mogli bi da zadrže statičan položaj. Zasluge: Inženjerska laboratorija neuromuskularne rehabilitacije u zajedničkom odeljenju za biomedicinsko inženjerstvo na Državnom univerzitetu NC i UNC Chapel Hill
Nova studija se nadovezuje na prethodni rad, koji je pokazao da neuronska kontrola protetskog skočnog zgloba može vratiti niz sposobnosti, uključujući stajanje na izazovnim površinama i čučanje.
Za ovu studiju, istraživači su radili sa pet ljudi koji su imali amputacije ispod kolena na jednoj nozi. Učesnicima studije je ugrađen prototip robotskog protetskog skočnog zgloba koji reaguje na EMG signale koje prime senzori na nozi.
„U osnovi, senzori se postavljaju preko mišića na mestu amputacije“, kaže Aaron Fleming, koautor studije i nedavni doktor nauka. diplomirao na NC State. „Kada učesnik studije razmišlja o pomeranju amputiranog ekstremiteta, to šalje električne signale kroz zaostali mišić u donjem ekstremitetu. Senzori pokupe ove signale kroz kožu i prevode te signale u komande za protetski uređaj.“
Istraživači su sproveli opštu obuku za učesnike studije koristeći prototip uređaja, tako da su donekle bili upoznati sa tehnologijom.
Učesnici studije su tada imali zadatak da odgovore na „očekivanu perturbaciju“, što znači da su morali da reaguju na nešto što bi moglo poremetiti njihovu ravnotežu. U svakodnevnom životu to može biti nešto poput hvatanja lopte ili podizanja namirnica. Međutim, kako bi se uslovi precizno ponovili tokom studije, istraživači su razvili mehanički sistem dizajniran da izazove stabilnost učesnika.
Učesnici studije su zamoljeni da odgovore na očekivanu perturbaciju pod dva uslova: korišćenjem protetskih uređaja koje su inače koristili; i korišćenjem prototipa robotske proteze.
„Otkrili smo da su učesnici studije bili znatno stabilniji kada su koristili robotski prototip“, kaže Fleming. „Manje je bilo da se spotaknu ili padnu.
„Konkretno, robotski prototip je omogućio učesnicima studije da promene svoju strategiju posturalne kontrole“, kaže Huang. „Za ljude koji imaju netaknut donji ekstremitet, posturalna stabilnost počinje od skočnog zgloba. Za ljude koji su izgubili donji ud, oni obično moraju da nadoknade nedostatak kontrole nad skočnim zglobom. Otkrili smo da korišćenjem robotskog gležnja koji reaguje na EMG signale omogućava korisnicima da se vrate svom instinktivnom odgovoru za održavanje stabilnosti.“
U posebnom delu studije, istraživači su zamolili učesnike studije da se njišu napred-nazad dok koriste svoju normalnu protezu i dok koriste prototip robotske proteze. Učesnici studije su bili opremljeni senzorima dizajniranim za merenje mišićne aktivnosti u celom donjem delu tela.
„Otkrili smo da su obrasci mišićne aktivnosti u donjem delu tela bili veoma različiti kada su ljudi koristili dve različite proteze“, kaže Huang.
„U suštini, obrasci aktivacije mišića kada se koristi prototip protetike bili su veoma slični obrascima koje vidimo kod ljudi koji u potpunosti koriste dva netaknuta donja udova. To nam govori da prototip koji smo razvili oponaša ponašanje tela dovoljno blisko da omogući ljudima ‘normalno’ Ovo je važno, jer sugeriše da će tehnologija biti donekle intuitivna za korisnike.
„Mislimo da je ovo klinički značajan nalaz, jer je posturalna stabilnost važno pitanje za ljude koji koriste protetske uređaje. Sada sprovodimo veće ispitivanje sa više ljudi kako bismo pokazali efekte tehnologije i identifikovali koji pojedinci mogu imati najviše koristi.“


