Roboti koje su napravili inženjeri na Kalifornijskom univerzitetu u San Dijegu pomogli su da se postigne veliki napredak u razumevanju kako je let insekata evoluirao, kao što je opisano u časopisu Nature. Studija je rezultat šestogodišnje saradnje između robotičara sa UC San Diego i biofizičara sa Tehnološkog instituta Džordžije.
Nalazi se fokusiraju na to kako su se dva različita načina leta razvila kod insekata. Većina insekata koristi svoj mozak da aktivira mišiće leta pri svakom potezu krila, baš kao što mi aktiviramo mišiće na nogama svakim korakom koji napravimo. Ovo se zove sinhroni let.
Ali neki insekti, kao što su komarci, mogu da mašu krilima, a da njihov nervni sistem ne upravlja svakim potezom krila. Umesto toga, mišići ovih životinja se automatski aktiviraju kada se istegnu. Ovo se zove asinhroni let. Asinhroni let je uobičajen kod nekih insekata u četiri glavne grupe insekata, omogućavajući im da mašu krilima velikom brzinom, dozvoljavajući nekim komarcima da zamahnu krilima više od 800 puta u sekundi, na primer.
Godinama su naučnici pretpostavljali da su četiri grupe insekata — pčele, muve, bube i prave bube (Hemiptera) — sve evoluirale kao asinhroni let odvojeno. Međutim, nova analiza koju je izvršio Georgia Tech tim zaključuje da je asinhroni let zapravo evoluirao zajedno u jednom zajedničkom pretku. Zatim su se neke grupe vrsta insekata vratile na sinhroni let, dok su druge ostale asinhrone.
Otkriće da su neki insekti kao što su moljci evoluirali iz sinhronog u asinhroni, a zatim nazad u sinhroni let, dovelo je istraživače na put istraživanja koji je zahtevao eksperimente sa insektima, robotima i matematikom. Ovo novo evoluciono otkriće postavilo je dva fundamentalna pitanja: da li mišići moljaca pokazuju potpise njihove prethodne asinhronosti i kako insekt može da održi i sinhrona i asinhrona svojstva u svojim mišićima i da i dalje bude sposoban da leti?
Idealan primerak za proučavanje ovih pitanja sinhrone i asinhrone evolucije je Havkmoth. To je zato što moljci koriste sinhroni let, ali evolucioni zapisi nam govore da imaju pretke sa asinhronim letom.
Istraživači sa Georgia Tech-a su prvo pokušali da izmere da li se potpisi asinhronije mogu primetiti u mišiću Havkmoth. Kroz mehaničku karakterizaciju mišića otkrili su da Havkmoths i dalje zadržavaju fizičke karakteristike mišića asinhronog leta – čak i ako se ne koriste.
Kako insekt može imati i sinhrona i asinhrona svojstva, a da i dalje leti? Da bi odgovorili na ovo pitanje, istraživači su shvatili da bi im korišćenje robota omogućilo da izvode eksperimente koji se nikada ne bi mogli uraditi na insektima. Na primer, mogli bi da opremaju robote motorima koji bi mogli da oponašaju kombinacije asinhronih i sinhronih mišića i testiraju koji su se prelazi mogli desiti tokom miliona godina evolucije leta. Pogledajte kako su roboti pomogli da se objasni kako je asinhroni let evoluirao. Zasluge: Univerzitet Kalifornije u San Dijegu/Georgia Tech
Rad naglašava potencijal robofizike – praksu korišćenja robota za proučavanje fizike živih sistema, rekao je Nick Gravish, profesor mašinstva i vazduhoplovstva na UC San Diego Jacobs School of Engineering i jedan od starijih autora rada.
„Uspeli smo da pružimo razumevanje o tome kako može doći do prelaza između asinhronog i sinhronog leta“, rekao je Graviš. „Izgradnjom robota sa lepršavim krilima pomogli smo da damo odgovor na evoluciono pitanje u biologiji.
U suštini, ako pokušavate da razumete kako se životinje – ili druge stvari – kreću kroz svoje okruženje, ponekad je lakše napraviti robota koji ima slične karakteristike kao ove stvari i koji se kreće kroz isto okruženje, rekao je Džejms Linč, koji je zaradio svoje Dr. u Gravišovoj laboratoriji i jedan je od vodećih koautora rada.
„Jedan od najvećih evolucionih otkrića ovde je da se ovi tranziciji dešavaju u oba smera i da umesto višestrukog nezavisnog porekla asinhronog mišića, zapravo postoji samo jedan“, rekao je Bret Ajelo, docent biologije na Univerzitetu Seton Hil i jedan ko-prvih autora. Uradio je posao za svoju studiju kada je bio postdoktorski istraživač u laboratoriji profesora Georgia Tech Simona Sponberga. „Od tog jednog nezavisnog porekla, došlo je do više revizija nazad na sinhronizaciju.“
Linč i prvi autor Džef Gau, dr. student na Georgia Tech-u, zajedno su radili na proučavanju moljaca i merenju njihove mišićne aktivnosti u uslovima leta. Zatim su napravili matematički model pokreta leptiranog krila moljca.
Linč je model vratio u UC San Diego, gde je preveo matematički model u komande i kontrolne algoritme koji su se mogli poslati robotu koji oponaša krilo moljca. Roboti koje je napravio na kraju su bili mnogo veći od moljaca – i kao rezultat toga, lakši za posmatranje. To je zato što se u fizici fluida, veoma veliki objekat koji se kreće veoma sporo kroz gušći medijum – u ovom slučaju voda – ponaša se na isti način kao veoma mali objekat koji se kreće mnogo brže kroz tanji medijum – u ovom slučaju vazduh.
„Dinamički smo skalirali ovog robota tako da je ovaj mnogo veći robot koji se kreće mnogo sporije predstavljao mnogo manje krilo koje se kreće mnogo brže“, rekao je Linč.
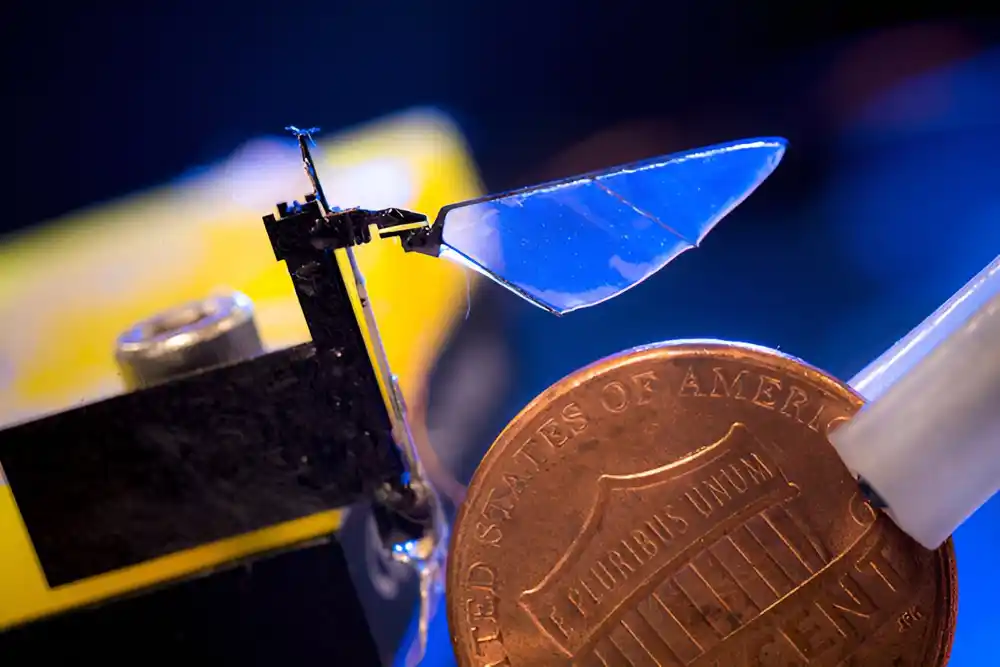
Tim je napravio dva robota: velikog robota sa flaperom po uzoru na moljca da bi bolje razumeo kako funkcionišu krila, koje su rasporedili u vodi. Napravili su i mnogo manjeg robota sa zaklopkom koji je radio u vazduhu (po modelu Harvardove robo pčele).
Eksperimenti sa robotom i modeliranjem pomogli su istraživačima da testiraju kako insekt može da pređe sa sinhronog na asinhroni let. Na primer, istraživači su uspeli da naprave robota sa motorima koji bi mogli da kombinuju sinhroni i asinhroni let i vide da li će zaista moći da leti. Otkrili su da pod pravim okolnostima, insekt može postepeno i glatko da prelazi između dva načina rada.
„Eksperimenti robota su omogućili mogući put za ovu evoluciju i tranziciju“, rekao je Graviš.
Linč se susreo sa nekoliko izazova, uključujući modeliranje protoka tečnosti oko robota i modeliranje svojstva povratne sprege mišića insekata kada je istegnut. Linč je uspeo da reši ovo tako što je pojednostavio model što je više moguće, a istovremeno se pobrinuo da ostane tačan. Posle nekoliko eksperimenata, takođe je shvatio da će morati da uspori pokrete botova da bi ih održao stabilnim.
Sledeći koraci iz perspektive robotike će uključivati rad sa naučnicima o materijalima na opremanju flappera materijalima sličnim mišićima.
„Pored toga što pomaže u razjašnjavanju evolucije i biofizike leta insekata, ovaj rad ima koristi za robotiku. Roboti sa asinhronim motorima mogu brzo da se prilagode i reaguju na okruženje, kao što je nalet vetra ili sudar krila“, rekao je Graviš. Istraživanje bi takođe moglo pomoći robotičarima da dizajniraju bolje botove sa mašućim krilima.
„Ova vrsta posla bi mogla da pomogne da se uvede nova era odzivnih i prilagodljivih sistema krila za mahanje“, rekao je Graviš.


