Istraživačka grupa koju predvodi prof. Ksu Tiantian sa Šenžen instituta za naprednu tehnologiju (SIAT) Kineske akademije nauka i njihovi saradnici predložili su magnetno kontrolisan sistem robota vodiča (MCGRS) sa magnetno aktivnim upravljanjem i mogućnostima autonomnog pogona.
Studija je objavljena u Advanced Intelligent Sistems 31. avgusta.
Vaskularna intervencijska hirurgija je tehnika operacije koja koristi žice vodiče, katetere i druge instrumente za dijagnostikovanje i lečenje abnormalnosti putem vaskularnog puta pod vođstvom medicinske opreme za snimanje. Međutim, ova operacija zahteva visok nivo iskustva od lekara, i oni moraju da posmatraju položaj žice vodiča pod kontrastom, što ih izlaže akumuliranom zračenju. Štaviše, interventni medicinski resursi su oskudni u udaljenim oblastima.
Novi sistem omogućava lekarima da daljinski upravljaju magnetnom žicom vodičem, brzo izaberu tačan put kroz složene vaskularne bifurkacije i stignu do ciljanog mesta, efikasno smanjujući izloženost lekara radijaciji i podržavajući udaljena područja.
Sistem je predložen na osnovu metoda modeliranja i planiranja putanje. Istraživači su pričvrstili deo magnetnog hidrogel materijala na vrh žice vodiča kako bi ona magnetski reagovala, omogućavajući joj da se fleksibilno upravlja pod spoljnim magnetnim poljem. Povratne informacije o njegovom položaju su verifikovane putem sistema za snimanje.
Kombinujući model dipola i model Cosserat-štapa, tim je kreirao model mehanike kontinuuma da bi predvideo deformaciju vrha žice vodiča. U međuvremenu, razvijen je algoritam za planiranje putanje da bi se dobila poziciona putanja spoljnog magneta i brzina pokretanja naprednjaka da bi se realizovala autonomna kontrola zasnovana na vaskularnom putu.
Pored toga, oni su potvrdili da predloženi model može predvideti i rekonstruisati nelinearnu deformaciju vrha žice vodiča kroz karakterizaciju magnetnog polja i eksperimente karakterizacije upravljanja.
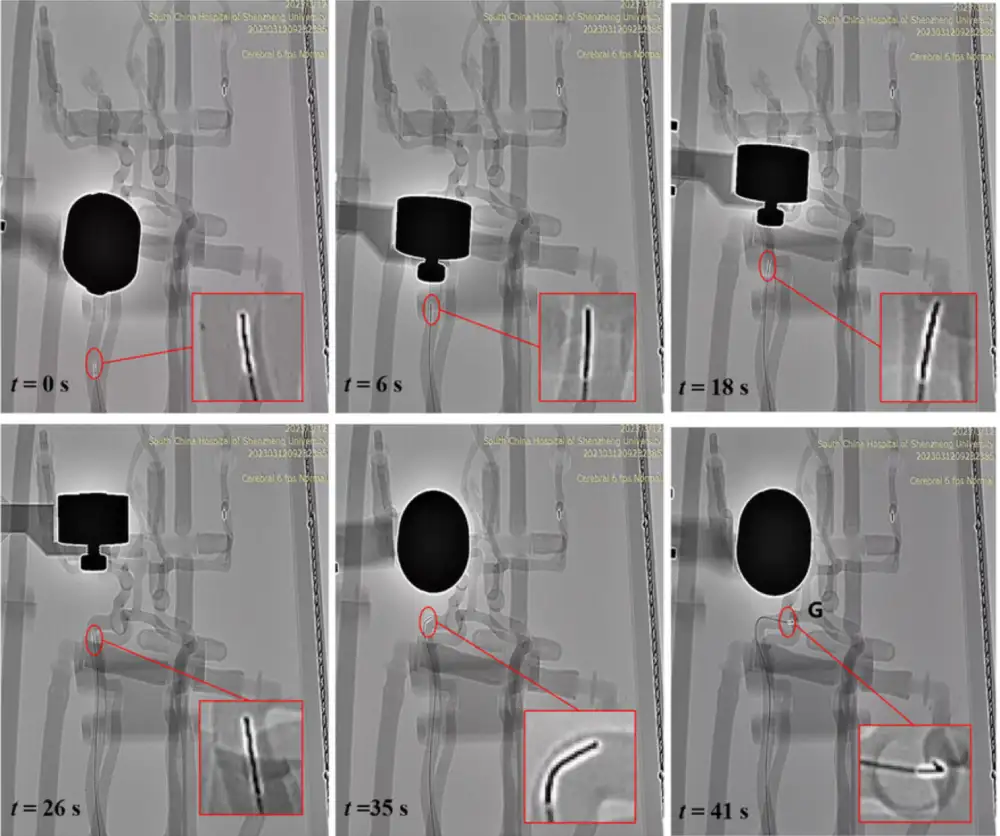
„Ostvarili smo autonomnu kontrolu magnetne žice vodiča. Nju je kontrolisalo magnetno polje kako bi se došlo do četiri ciljane lokacije srednje moždane arterije od tačke punkcije kroz četiri različite putanje u 3D vaskularnom fantomu prema poznatim vaskularnim putanjama, a vreme dolaska je bilo manje od dva minuta“, rekao je prof.
Lekari su mogli daljinski da kontrolišu magnetnu žicu vodiča kroz desnu unutrašnju karotidnu arteriju vaskularnog fantoma da bi došli do ciljane lokacije pod u realnom vremenu navođenja digitalne subtrakcione angiografije izvan operacione sale, a ceo proces je trajao oko dva minuta.
U budućnosti, istraživači će nastaviti da proučavaju inteligentnu kontrolu MCGRS-a kako bi pomogli lekarima da efikasnije i bezbednije obavljaju intervencijske procedure.