Roboti zasnovani na mekim materijalima često su bolji u repliciranju izgleda, pokreta i sposobnosti ljudi i životinja. Iako sada postoji bezbroj mekih robota, mnoge od njih je teško proizvesti u velikim razmerama, zbog visoke cene njihovih komponenti ili njihovog složenog procesa proizvodnje.
Istraživači sa Univerziteta Koimbra u Portugalu nedavno su razvili novu meku robotsku ruku koja bi mogla biti pristupačnija i lakša za proizvodnju. Njihov dizajn, predstavljen u Ciborg i Bionic Sistems, integriše meke aktuatore sa egzoskeletom, od kojih se oba mogu proizvesti korišćenjem skalabilnih tehnika.
„Većina robota je napravljena od krutih materijala“, rekao je Pedro Neto, jedan od istraživača koji su sproveli studiju, za Tech Ksplore. „Međutim, kada posmatramo životinje, primećujemo da njihova tela mogu biti sastavljena od tvrdih delova (skeleta) i mekih delova (kao što su mišići). Neke životinje, poput kišnih glista, su potpuno mekog tela. Uzimajući inspiraciju iz prirode, predviđamo da će sledeća generacija robota uključivati komponente napravljene od mekih materijala ili, u nekim slučajevima, oni mogu biti potpuno mekog tela.“
U poređenju sa krutim robotima, meki robotski sistemi bi mogli biti sigurniji i mogli bi bolje koegzistirati sa ljudima ili životinjama u spoljašnjim i zatvorenim okruženjima. Na primer, ako se sudare sa ljudima, životinjama ili objektima u svom okruženju, manje je verovatno da će ovi roboti izazvati značajnu štetu ili povrede.
Ključni cilj nedavnog rada Neta i njegovih kolega bio je razvoj nove meke robotske ruke koja je i sigurna i pristupačna. Takvu ruku bi teoretski bilo lakše primeniti u velikim razmerama, što bi podstaklo nova istraživanja i inovacije u oblasti robotike.
„Iskoristili smo analizu konačnih elemenata da bismo optimizovali dizajn pre nego što smo fizički proizveli ruku, smanjujući troškove izrade prototipa“, objasnio je Neto. „Korišćenje redovnog 3D štampanja pokazalo se efikasnim direktnim štampanjem nekih komponenti u mekim materijalima i štampanjem kalupa u čvrstim materijalima.“
Meka robotska ruka koju su kreirali Neto i njegove kolege zasnovana je na nekoliko različitih materijala. Njegova pažljivo dizajnirana struktura trebalo je da replicira izgled i funkcionalnost ljudskih ruku, reprodukujući njihove pokrete i sposobnosti.
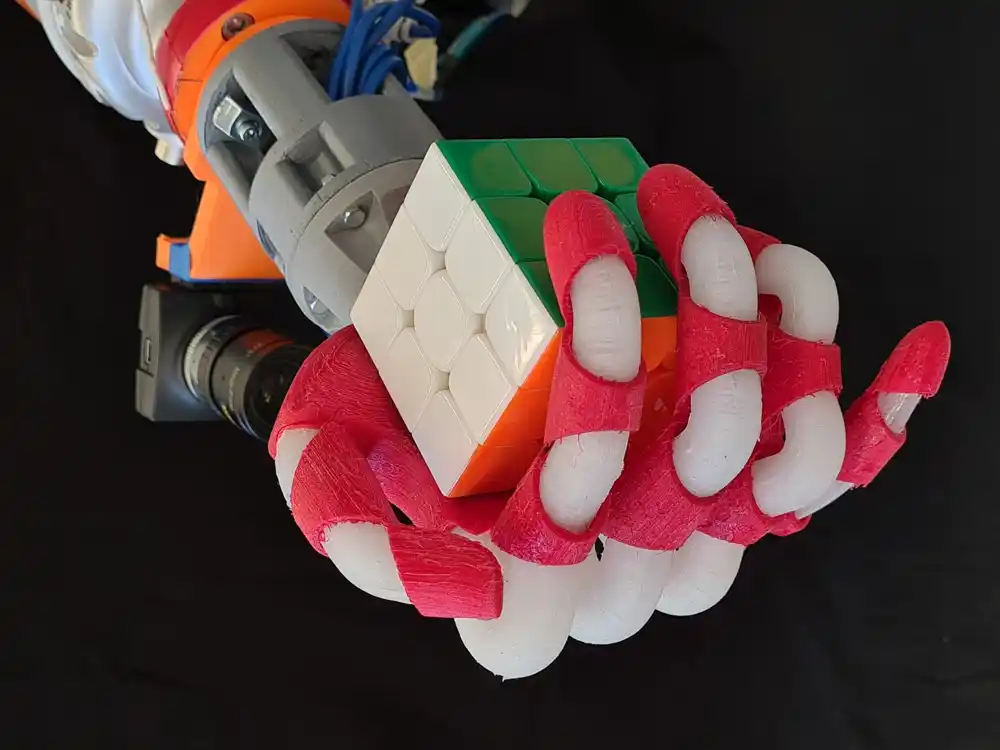
„Konfiguracija robotske ruke sastoji se od pet mekih pokretača, od kojih svaki odgovara prstu, i egzoskeleta koji promoviše savitljivost prsta“, rekao je Neto. „ON-OFF kontroler održava određene uglove savijanja prstiju, omogućavajući ruci da efikasno hvata predmete različitih oblika, težine i dimenzija.“
Istraživači su do sada procenili performanse svoje robotske ruke u nizu simulacija i eksperimenata. Njihovi početni rezultati su veoma obećavajući, jer je ruka mogla uspešno da uhvati brojne predmete različitih oblika, težine i veličina.
„Primarni doprinos je integrisani sistem projektovanja i proizvodnje koji koristi analizu konačnih elemenata za optimizaciju dizajna pre njihove proizvodnje“, rekao je Neto. „Ovo dostignuće ima potencijal da poveća dostupnost mekih robotskih ruku dok istovremeno smanjuje troškove i eliminiše tipično dugotrajne procedure projektovanja i proizvodnje, koje se često oslanjaju na iterativne tokove rada koji zahtevaju velike resurse.“
U budućnosti, meku robotsku ruku koju je razvio ovaj tim istraživača mogli bi da koriste i akademski timovi i pojedinačni roboti za testiranje novih algoritama veštačke inteligencije (AI) i drugih računarskih alata koji imaju za cilj unapređenje sposobnosti robota. Pored toga, njegov dizajn bi mogao otvoriti nove puteve za jeftinu proizvodnju humanoidnih robota koji mogu pomoći ljudima u njihovim svakodnevnim aktivnostima.
„Naše sledeće studije će se fokusirati na poboljšanje proizvodnje mekih aktuatora i senzora, sa ciljem da poboljšaju dostupnost mekih robota široj publici“, dodao je Neto. „Kontrola mekih robota pomoću veštačke inteligencije je još jedna istraživačka tema na kojoj radimo.“


