Automatizovanim vozilima (AV) će biti potrebna ažuriranja o uslovima vožnje. Prethodne studije predviđaju infrastrukturu pored puta koja prenosi takva ažuriranja putem snopa koncentrisanih, milimetarskih radio talasa. Međutim, ostaju izazovi, kao što je tačno određivanje lokacije AV koji se brzo kreće kako bi se pratio snopom i formiranje optimalnog snopa u kratkom vremenskom intervalu koji će pouzdano prenositi podatke velikom brzinom i malom latencijom.
Da bi pomogli u rešavanju oba izazova, istraživači NIST-a analizirali su ove studije infrastrukture pored puta i razvili metod koji koristi „Učenje za pojačanje“, oblik veštačke inteligencije koja nagrađuje sistem za predviđeni učinak. Metoda je opisana u „Praćenje snopa uz pomoć učenja uz pomoć dubokog pojačanja i prenos podataka za 5G V2Ks mreže (od vozila do svega)“, objavljenog u IEEE Transactions on Intelligent Transportation Sistems.
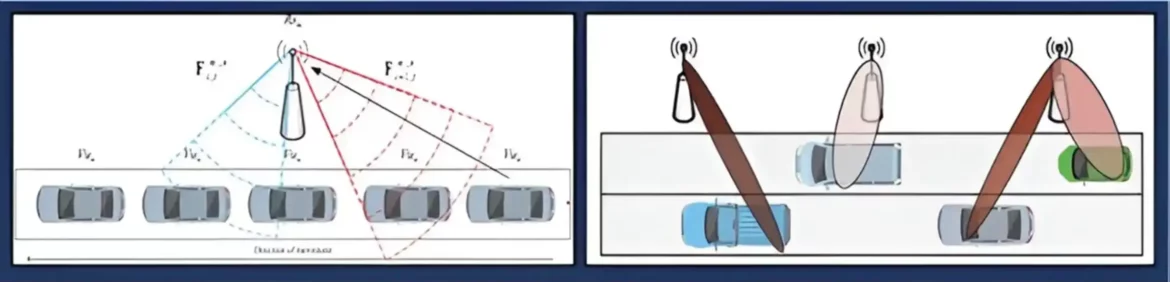
Učenje pomoću ove metode pomaže infrastrukturi pored puta da optimizuje predviđanja AV lokacija koje se brzo kreću na osnovu njihovih veza. Takođe pomaže infrastrukturi pored puta da se formira i prilagodi optimalne obrasce snopa za prenos podataka na AV.
Ovaj metod se zasnivao na istraživačima NIST-a koji su koristili okvir za učenje sa pojačanjem, u kojem su mapirali parametre koji utiču na performanse komunikacije između vozila i infrastrukture u oblike stanja, akcije i nagrade. Takođe su otkrili da se tačnost praćenja snopa i optimizacija snopa mogu povećati revizijom ovog okvira.
Istraživači NIST-a koristili su simulacije za procenu metode. Rezultati su pokazali da ovaj metod ima dobre rezultate u tačnosti praćenja, brzini podataka i vremenskoj efikasnosti. Simulacije takođe pokazuju da je izabrani okvir nadmašio druge okvire koji su razmatrani.


