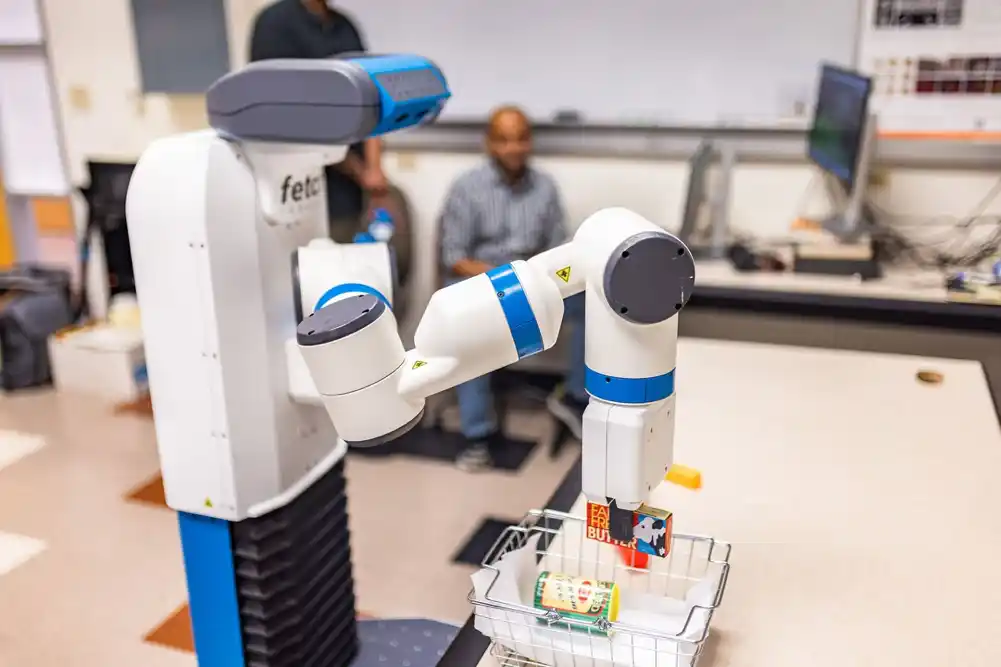
Robot pomera igračku pakovanje putera oko stola u laboratoriji za inteligentnu robotiku i viziju na Univerzitetu Teksas u Dalasu. Sa svakim pritiskom, robot uči da prepozna objekat kroz novi sistem koji je razvio tim kompjuterskih naučnika iz UT Dalasa.
Novi sistem omogućava robotu da gura objekte više puta dok se ne prikupi niz slika, što zauzvrat omogućava sistemu da segmentira sve objekte u nizu dok robot ne prepozna objekte. Prethodni pristupi su se oslanjali na jedan pritisak ili hvatanje od strane robota da bi „naučio“ objekat.
Tim je predstavio svoj istraživački rad na konferenciji Robotika: Nauka i sistemi održanoj od 10. do 14. jula u Daeguu, Južna Koreja. Radovi za konferenciju odabrani su zbog njihove novine, tehničkog kvaliteta, značaja, potencijalnog uticaja i jasnoće.
Dan kada roboti mogu da kuvaju večeru, raščiste kuhinjski sto i isprazne mašinu za pranje sudova je još daleko. Ali istraživačka grupa je napravila značajan napredak sa svojim robotskim sistemom koji koristi veštačku inteligenciju kako bi pomogao robotima da bolje identifikuju i pamte objekte, rekao je dr Iu Ksiang, stariji autor rada.
„Ako zamolite robota da pokupi šolju ili vam donese flašu vode, robot mora da prepozna te objekte“, rekao je Ksiang, docent računarstva na Školi za inženjerstvo i računarstvo Erik Jonsson.
Tehnologija istraživača UTD je dizajnirana da pomogne robotima da otkriju širok spektar objekata koji se nalaze u okruženjima kao što su kuće i da generalizuju ili identifikuju slične verzije uobičajenih predmeta kao što su boce za vodu koje dolaze u različitim brendovima, oblicima ili veličinama.
Unutar Sjangove laboratorije nalazi se kanta za skladištenje puna paketa igračaka uobičajene hrane, kao što su špageti, kečap i šargarepa, koji se koriste za obuku laboratorijskog robota po imenu Ramp. Ramp je Fetch Robotics mobilni manipulator robot koji je visok oko 4 stope na okrugloj mobilnoj platformi. Rampa ima dugačku mehaničku ruku sa sedam zglobova. Na kraju je kvadratna „ruka“ sa dva prsta za hvatanje predmeta.
Ksiang je rekao da roboti uče da prepoznaju predmete na uporediv način sa načinom na koji deca uče da komuniciraju sa igračkama. Zasluge: Univerzitet Teksasa u Dalasu
„Nakon što gurne objekat, robot uči da ga prepozna“, rekao je Ksiang. „Sa tim podacima obučavamo AI model tako da sledeći put kada robot vidi objekat, ne mora da ga ponovo gura. Kada drugi put vidi objekat, samo će ga podići.“
Ono što je novo u metodi istraživača je da robot gura svaku stavku 15 do 20 puta, dok prethodne metode interaktivne percepcije koriste samo jedan pritisak. Ksiang je rekao da višestruki guranja omogućavaju robotu da snimi više fotografija sa svojom RGB-D kamerom, koja uključuje senzor dubine, kako bi detaljnije saznao o svakoj stavci. Ovo smanjuje mogućnost grešaka.
Zadatak prepoznavanja, razlikovanja i pamćenja objekata, nazvan segmentacija, jedna je od primarnih funkcija potrebnih robotima da završe zadatke.
„Prema našim saznanjima, ovo je prvi sistem koji koristi dugoročnu interakciju robota za segmentaciju objekata“, rekao je Ksiang.
Ninad Khargonkar, doktorant informatike, rekao je da mu je rad na projektu pomogao da poboljša algoritam koji pomaže robotu da donosi odluke.
„Jedna je stvar razviti algoritam i testirati ga na skupu apstraktnih podataka; druga je stvar testirati ga na zadacima iz stvarnog sveta“, rekao je Khargonkar. „Vidjeti te performanse u stvarnom svijetu—to je bilo ključno iskustvo učenja.“
Sledeći korak za istraživače je poboljšanje drugih funkcija, uključujući planiranje i kontrolu, što bi moglo da omogući zadatke kao što je sortiranje recikliranih materijala.


