Potraga za inovativnim materijalima će biti u velikoj meri potpomognuta softverom koji može da predloži nove eksperimentalne mogućnosti i takođe kontroliše robotske sisteme koji ih proveravaju.
Veštačka inteligencija (AI) i robotski eksperimentalni sistemi su se udružili u pionirskom radu na dokazivanju koncepta u Nacionalnom institutu za nauku o materijalima (NIMS) u Japanu. Istraživači opisuju razvoj i demonstraciju svog softvera za automatizaciju „zatvorene petlje“ u časopisu Science and Technologi of Advanced Materials: Methods.
„Opšti cilj našeg rada je da omogućimo da se eksperimenti koji istražuju nauku o materijalima osmisle i zatim nastave automatski, bez ljudske intervencije“, kaže fizičar i softverski inženjer Rio Tamura iz NIMS Centra za osnovna istraživanja materijala. AI prvo obavlja zadatke prikupljanja informacija i eksperimentalnog dizajna koje inače rade ljudi, a zatim kontroliše robotske sisteme koji mogu da izvrše potrebne fizičke zadatke.
Tim je demonstrirao potencijal svog sistema koristeći ga za identifikaciju elektrolita koji bi bili pogodni za posredovanje kretanja jona u litijum-metalnim baterijama.
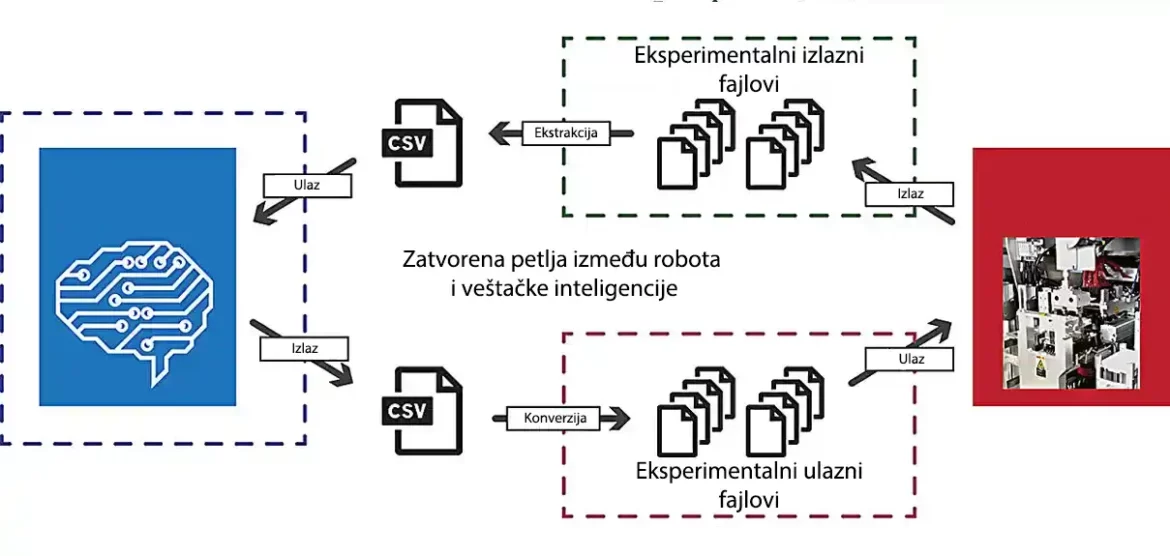
Softver, nazvan NIMS Orchestration Sistem (NIMS-OS), sadrži dva osnovna tipa modula. Prvi koristi AI algoritme za istraživanje arhiviranih podataka o svojstvima materijala. On bira materijale koji obećavaju i predlaže eksperimentalne postupke koji bi im omogućili postizanje željenog cilja. Drugi tip modula generiše uputstva potrebna za kontrolu robotskog sistema koji će instrukcije primeniti u praksi.
Da bi ceo proces bio što lakši za korišćenje za širok spektar istraživača, tim je takođe dizajnirao grafički korisnički interfejs koji je jednostavan za korišćenje za kontrolu.
„Rezultati inicijalnog rada robotskog sistema preko NIMS-OS-a mogu se vratiti da bi se poboljšali AI algoritmi koji ga kontrolišu, kroz nekoliko ciklusa testiranja i poboljšanja“, kaže Tamura.
U zadatku dokazivanja koncepta koji je istraživao opcije za pravljenje elektrolita koji maksimiziraju performanse elektrode u litijum-metalnoj bateriji, NIMS-OS je koristio sisteme koji su robotski sastavljeni u elektrohemijske ćelije i podvrgnuti ciklusima punjenja i pražnjenja kako bi analizirali njihove performanse. Rezultati su jasno identifikovali bolju kompoziciju elektrolita i ukazali da postoji prostor za poboljšanje elektrolita koji se trenutno široko koriste komercijalno.
„Naš NIMS-OS je sada javno dostupan kao softver otvorenog koda na široko korišćenoj veb lokaciji GitHub“, kaže Tamura. „Sada planiramo da ga dalje razvijamo kako bismo mu omogućili da radi zajedno sa mnogim različitim tipovima robotskih eksperimentalnih sistema.“


