NASA i druge svemirske agencije širom sveta povremeno šalju robote i automatizovana vozila u svemir da istražuju planete i druge nebeske objekte u našem solarnom sistemu. Ove misije mogu značajno poboljšati naše razumevanje životne sredine i resursa u drugim delovima Sunčevog sistema.
Istraživači sa Instituta za vazduhoplovne studije Univerziteta u Torontu i NASA-ine Laboratorije za mlazni pogon (JPL) nedavno su sproveli studiju koja istražuje strategije oporavka koje bi mogle poboljšati efikasnost i uspeh lunarnih istraživanja pomoću rovera na solarni pogon. Njihov rad, prethodno objavljen na arKsiv-u, uvodi novi pristup koji bi mogao pomoći roverima na solarni pogon da bezbedno napuste trajno zasjenjene regije na Mjesecu.
„Poslednjih godina, nekoliko nacija je izrazilo interesovanje za istraživanje južnog pola Meseca, uključujući Sjedinjene Države, Kinu, Indiju, Rusiju i druge“, rekao je za Phis.org Olivije Lamar, istraživač koji je vodio studiju.
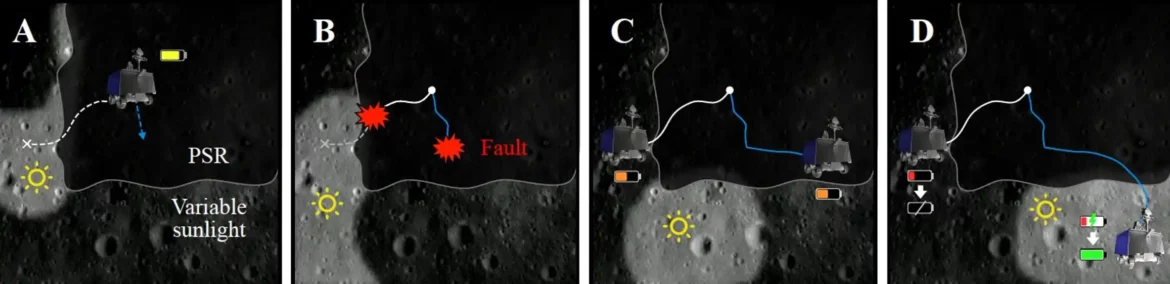
„Većina njih planira da koristi rovere na solarni pogon za istraživanje područja koja su stalno u senci (nazvana trajno zasjenjena područja, ili PSR), za koje sumnjamo da mogu sadržavati velike količine vodenog leda. Kao što se može zamisliti, ulazak u PSR sa roverom na solarni pogon je rizičan poduhvat! Ako rover kasni zbog kvarova, možda neće moći da se vrati na sunčevu svetlost pre nego što ostane bez energije.“
Roveri na solarni pogon mogu imati brojne prednosti u pogledu energetske efikasnosti, ali su ograničeni njihovim oslanjanjem na sunčevu svetlost za rad. Kako su neki regioni na Mesecu stalno u senci, oslanjanje rovera na sunčevu svetlost može ih sprečiti da bezbedno istražuju i zatim napuste ove oblasti, uzrokujući da ostanu bez energije tokom svoje misije.
Ključni cilj nedavnog rada Lamarrea i njegovih kolega bio je da kvantifikuju verovatnoću gubitka rovera na solarni pogon dok istražuju ove zasjenjene oblasti na Mesecu. Pored toga, tim je želeo da osmisli pristup koji bi mogao da pomogne da se maksimizira verovatnoća da će roveri na solarni pogon bezbedno završiti svoje misije.
„Prvo, moramo da definišemo šta znači da rover na solarni pogon bude „bezbedan“ na južnom polu Meseca“, objasnio je Lamar. „Da bismo to uradili, obraćamo pažnju na to gde rover izlazi iz PSR-a, u koje vreme i sa koliko energije je ostalo u njegovim baterijama. Ovo daje indikaciju da li rover može da hibernira na mestu pre sledećeg dela svoje misije ( i na taj način ostanite ‘bezbedni’ do tada). Zatim izračunavamo metod planiranja prelaska na mreži koji rover može da prati iz bilo kog početnog stanja (uključujući unutar PSR-ova) kako bismo maksimizirali svoju verovatnoću preživljavanja.“
Metodologija planiranja koju su izložili Lamarre i njegove kolege naziva se politikom oporavka, jer je to u suštini rezervna strategija koja omogućava roveru da maksimizira šanse za postizanje „bezbednosti“ (tj. regiona u koje će sunčeva svetlost doći do njega, dopunjavajući svoju baterija). U svom radu, istraživači su pokazali da izračunavanje ove politike oporavka može biti izazovno u ovom kontekstu, jer zahteva nekoliko aproksimacija koje bi, ako su u velikoj meri netačne, mogle uticati na pouzdanost ukupnih predviđanja.
„Na primer, vreme je kontinuirana dimenzija našeg državnog prostora koju treba diskretizovati“, rekao je Lamar.
„Moramo da se uverimo da ova aproksimacija/diskretizacija ne iskrivi na opasan način predviđanja o verovatnoći neuspeha. Na južnom polu Meseca, sunčevo osvetljenje je veoma dinamično; obližnje planine i krateri mogu bacati velike senke na površinu. Ako rover malo kasni u odnosu na ono što (približna) politika pretpostavlja, moglo bi da propusti kritični period solarnog punjenja. Isto važi i ako je malo ispred roka u poređenju sa onim što politika pretpostavlja.“
Kako ove vremenske aproksimacije u velikoj meri utiču na pouzdanost politika oporavka rovera na solarni pogon, Lamar i njegove kolege su ih držali veoma konzervativnim. Ovo na kraju minimizira rizik od neuspeha, dok povećava verovatnoću da će politika ostati bezbedna tokom misija u stvarnom svetu.
„Mislimo da je ovaj pristup koristan na mnogo načina“, rekao je Lamarre. „Prvo, to predstavlja korak ka autonomnim algoritmima za planiranje mobilnosti na dugom dometu koji proaktivno uzimaju u obzir (ili ‘razlažu’) rizik sa roverima na solarni pogon. Pored toga, naša tehnika bi mogla postati korisno sredstvo za ljudske operatere dok formulišu nove misije rovera na južnom polu Meseca (mogao bi da se koristi za izbor mesta za sletanje, globalno planiranje prelaska i predviđanje rizika i još mnogo toga), ili čak da podrži tekuću misiju kroz zemlju u operaciji petlje.“
U budućnosti, politika oporavka koju je uveo ovaj tim istraživača mogla bi se primeniti na misije istraživanja u stvarnom svetu na Mesecu, kako bi se smanjio rizik od gubitka rovera na solarni pogon u zasjenjenim regionima. Kako je nedavna studija sprovedena u saradnji sa NASA-inim JPL, pristup bi uskoro mogao biti testiran u različitim realističnim lunarnim scenarijima.
„Do sada smo testirali naš pristup koristeći orbitalne podatke kratera Cabeus, ali se nadamo da ćemo koristiti NASA-ine prilagođene karte solarnog osvetljenja i primeniti našu tehniku u mnogim drugim oblastima na južnom polu Meseca koje će jednog dana posetiti roboti. ili misije sa posadom, kao što su Shackleton, Faustini, Nobile, Havorth i Shoemaker Craters“, dodao je Lamarre. „Takođe, trenutno radimo na novoj generaciji algoritama za navigaciju dugog dometa koji predviđaju rizik za istraživanje južnog pola Meseca pomoću rovera na solarni pogon.“