Razmislite o tome kada ste poslednji put vezali cipelu: možda ste je čvrsto vezali ili vezali više čvorova kako biste bili sigurni da se pertle ne bi otkopčale. Verovatno ste se oslonili na intuiciju da vam kaže koliko napetosti treba da primenite da biste sprečili da se pertle odveže, a da ne povučete dovoljno snažno da ih pokidate.
Možda iznenađujuće, hirurzi takođe imaju intuitivan pristup vezivanju šavova. Dok se jednostavni kvadratni i babi klizni čvorovi često koriste u hirurgiji, potrebne su godine da se savladaju tako da ostanu na mestu bez popuštanja ili lomljenja. Urađeno je mnogo matematičkih istraživanja o topologiji i geometriji čvorova, ali se malo zna o mehanici čvorova u kontekstu fizičkih varijabli, kao što su svojstva materijala čvorovanih filamenata.
„Zapanjujuće je pomisliti koliko se oslanjamo na čvorove, kada zapravo ne razumemo kako oni funkcionišu“, kaže Pedro Reis, šef Laboratorije za fleksibilne strukture u Fakultetu inženjeringa (Institut za mašinstvo). Reis i dr. student Pol Johans se udružio sa plastičnim hirurgom iz Lozane Samijom Geridom kako bi vodio prvu studiju zasnovanu na fizici objavljenu u Science Advances o mehanici hirurških čvorova i tačno koja svojstva utiču na njihovu snagu.
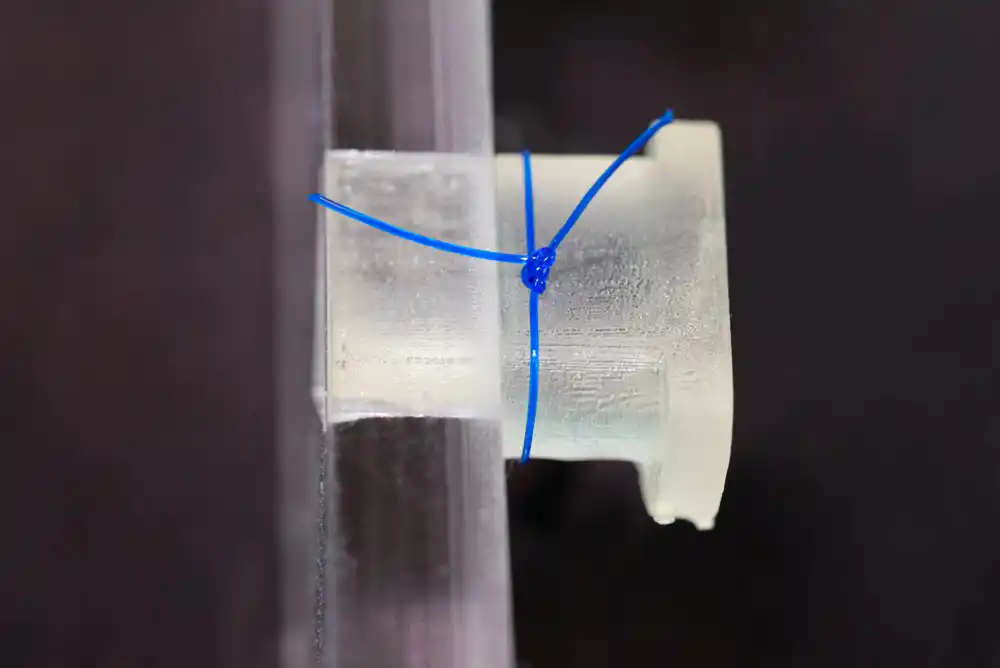
„Razumevanje mehanike hirurških čvorova može podići svest kod iskusnih hirurga, biti uključeno u programe obuke i unaprediti robotsku hirurgiju omogućavajući efikasnije mogućnosti vezivanja čvorova“, kaže Guerid. „Takva saznanja bi takođe mogla uticati na razvoj materijala za šavove koji povećavaju otpornost na klizanje u kliznim čvorovima.“ Studija otkriva mehaniku idealnog hirurškog čvora. Zasluge: Alain Herzog / EPFL
Reis, strastveni penjač, ima lični interes za bezbedne čvorove i sproveo je nekoliko prethodnih studija o mehanici čvorova. On objašnjava da se mnogi čvorovi mogu opisati kao strukture sa slobodnim krajem koje obezbeđuju silu držanja, a njihovu funkcionalnost diktiraju promenljive topologije, geometrije, elastičnosti, kontakta i trenja. Ali za proučavanje hirurških čvorova, Reis i njegove kolege su smatrali ključnim šestim faktorom: plastičnost polimera filamenta za šivanje.
Čvrstoća šavova napravljenih od polipropilenskih filamenata koji se koriste u hirurgiji zavisi od napetosti primenjene prilikom vezivanja čvora (pretenzija). Ova pretenzija trajno deformiše ili rasteže filament, stvarajući silu držanja. Premalo pretenzije uzrokuje da se čvor povuče; previše pukne filament.
Tim je analizirao 50-100 čvorova koje je vezao Guerid i otkrio da je hirurg, zahvaljujući svom dugogodišnjem iskustvu, intuitivno ciljao na pretenzivnu „slatku tačku“. Koristeći precizne eksperimente, rendgensku mikro-kompjutersku tomografiju i kompjuterske simulacije, naučnici su definisali prag između „labavih“ i „zategnutih“ čvorova, i otkrili odnose između jačine čvora i pretenzije, trenja i broja bacanja.
„Iznenađujuće, uprkos složenoj interakciji između svih šest faktora, primetili smo jednostavno, snažno pojavno ponašanje u odnosu na snagu čvora. Ali još uvek nemamo prediktivni model koji bi u potpunosti objasnio odnos između pretenzije čvora i snage, što izgleda dosledno, čak i van hirurških čvorova. Već razmatramo ovo pitanje.“
Nalazi tima mogli bi da budu dragoceno sredstvo za obuku hirurga, jer bi mogli da dozvole da se parametri bezbednog čvora prevedu u praktične smernice. Iako bi iskustvo ostalo važno, ideja je da se bezbedno vezivanje čvorova može naučiti korišćenjem prediktivnih modela, umesto intuicije stečene samo kroz godine prakse.
„Naši podaci nam daju recept za određivanje idealne pretenzije i broja bacanja, na primer, u zavisnosti od vrste korišćenog filamenta“, kaže Reis
„Nedostatak analize zasnovane na fizici predstavlja ograničenje“, dodaje Guerid. „Podaci o mehanici čvorova koji se mogu meriti mogu se integrisati u programe obuke kako bi se procenila zatezna čvrstoća svakog čvora, osiguravajući da polaznici steknu neophodne veštine za uspešne operacije. Podaci bi takođe mogli da olakšaju razvoj robotske hirurgije kroz programiranje robotskih sistema.“