Stonoge su poznate po svom vrckavom hodu. Sa desetinama do stotinama nogu, mogu da pređu bilo koji teren bez zaustavljanja.
„Kada vidite stonogu koja juri, u suštini vidite životinju koja nastanjuje svet koji se veoma razlikuje od našeg sveta kretanja“, rekao je profesor Danijel Goldman. „Našim pokretom u velikoj meri dominira inercija. Ako zamahnem nogom, slećem na nogu i krećem napred. Ali u svetu stonoga, ako prestanu da migolje delovima tela i udovima, u suštini prestaju da se kreću trenutno.“
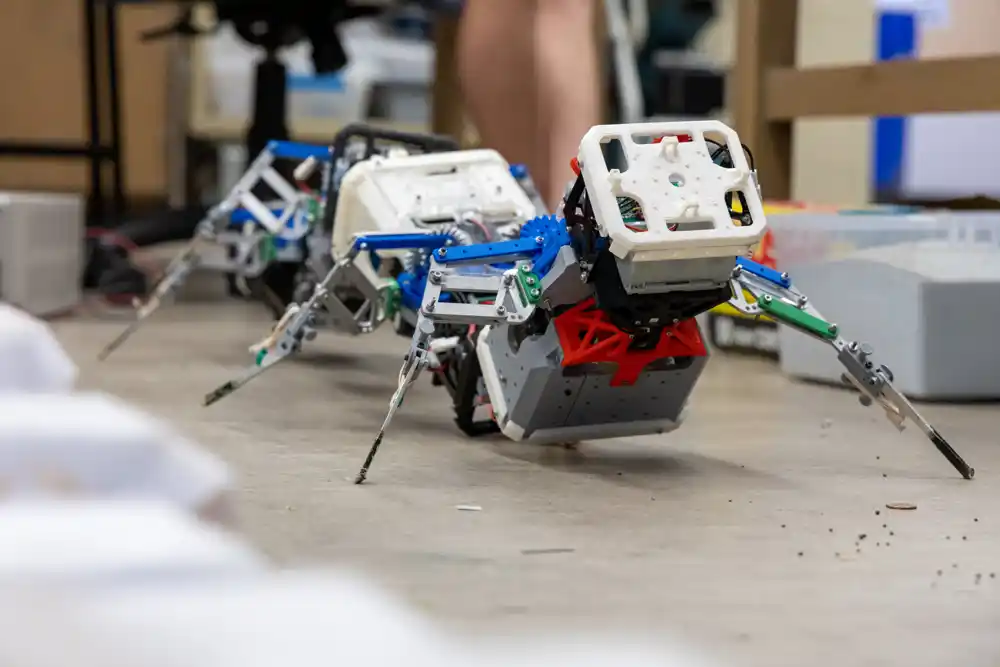
Zaintrigirani da vide da li mnogi udovi mogu biti od pomoći za kretanje u ovom svetu, tim fizičara, inženjera i matematičara sa Tehnološkog instituta Džordžije koristi ovaj stil kretanja u svoju korist. Razvili su novu teoriju kretanja sa više nogu i kreirali robotske modele sa više nogu, otkrivši da se robot sa suvišnim nogama može kretati po neravnim površinama bez ikakvih dodatnih senzora ili kontrolne tehnologije kao što je teorija predviđala.
Ovi roboti mogu da se kreću preko složenog, neravnog terena – i postoji potencijal da se koriste za poljoprivredu, istraživanje svemira, pa čak i potragu i spasavanje.
Istraživači su predstavili svoj rad u radovima „Transport sa više nogu: Okvir za kretanje na bučnim pejzažima“, u Nauci u maju i „Samopokretanje putem klizanja: Frikciono plivanje u višenožnim lokomotorima“, u Proceedings of the National Academi of Sciences u martu.
Za naučni rad, istraživači su bili motivisani komunikacijskom teorijom matematičara Kloda Šenona, koja pokazuje kako pouzdano prenositi signale na daljinu, da bi razumeli zašto je višenožni robot bio tako uspešan u lokomociji. Teorija komunikacije sugeriše da jedan od načina da se osigura da poruka stigne od tačke A do tačke B na šumovitoj liniji nije slanje kao analogni signal, već da se razbije na diskretne digitalne jedinice i ponovi ove jedinice sa odgovarajućim kodom.
„Bili smo inspirisani ovom teorijom i pokušali smo da vidimo da li višak može biti od pomoći u transportu materije“, rekao je Baksi Čong, postdoktorski istraživač fizike. „Dakle, započeli smo ovaj projekat da vidimo šta bi se desilo da imamo više nogu na robotu: četiri, šest, osam nogu, pa čak i 16 nogu.“
Tim predvođen Čongom, uključujući postdoktorskog saradnika sa Matematičke škole Daniela Irvinea i profesora Grega Blekhermana, razvio je teoriju koja predlaže da dodavanje parova nogu robotu povećava njegovu sposobnost da se robusno kreće preko izazovnih površina – koncept koji oni nazivaju prostorna redundantnost.
Ova redundantnost čini da noge robota budu uspešne same bez potrebe za senzorima da tumače okruženje. Ako jedna noga posustane, obilje nogu drži je u pokretu bez obzira na to. U stvari, robot postaje pouzdan sistem za transport sebe, pa čak i tereta od A do B na teškim ili „bučnim“ pejzažima. Koncept je uporediv sa načinom na koji se može garantovati tačnost u transportu na točkovima ako su pruga ili šina dovoljno glatki, ali bez potrebe za projektovanjem okruženja da bi se stvorila tačnost.
„Sa naprednim dvonožnim robotom, obično je potrebno mnogo senzora da ga kontrolišu u realnom vremenu“, rekao je Čong. „Ali u aplikacijama kao što su traganje i spasavanje, istraživanje Marsa ili čak mikro roboti, postoji potreba da se vozi robot sa ograničenim senzorima. Postoji mnogo razloga za takvu inicijativu bez senzora. Senzori mogu biti skupi i krhki, ili okruženja se mogu promeniti tako brzo da ne dozvoljavaju dovoljno vremena odziva senzora i kontrolera.“
Da bi ovo testirao, Juntao He, dr. student robotike, sproveo je seriju eksperimenata u kojima su on i Danijel Soto, student master studija na mašinskoj školi Džordž V. Vudraf, izgradili terene da oponašaju nekonzistentno prirodno okruženje.
Zatim je testirao robota povećavajući mu broj nogu za dve svaki put, počevši od šest i na kraju proširivši se na 16. Kako se broj nogu povećavao, robot je mogao agilnije da se kreće po terenu, čak i bez senzora, kao što je teorija predviđala. Na kraju su testirali robota na otvorenom na stvarnom terenu, gde je mogao da se kreće u različitim okruženjima.
„Zaista je impresivno prisustvovati veštini višenogog robota u navigaciji i terenima u laboratoriji i spoljašnjim okruženjima“, rekao je Juntao. „Dok se dvonožni i četvoronožni roboti u velikoj meri oslanjaju na senzore za prelazak složenog terena, naš robot sa više nogu koristi redundantnost nogu i može da ostvari slične zadatke sa kontrolom otvorenog kruga.
Istraživači već primenjuju svoja otkrića u poljoprivredi. Goldman je suosnivao kompaniju koja teži da koristi ove robote za korov na poljoprivrednom zemljištu gde su sredstva za ubijanje korova neefikasna.
„Oni su kao Roomba, ali napolju za kompleksno tlo“, rekao je Goldman. „Roomba funkcioniše jer ima točkove koji dobro funkcionišu na ravnom terenu. Do razvoja našeg okvira, nismo mogli sa sigurnošću da predvidimo pouzdanost lokomotora na neravnom, kamenitom, krhovitom terenu. Sada imamo početke takve šeme, koji bi se mogao koristiti da osigura da naši roboti pređu polje useva u određenom vremenskom periodu.“
Istraživači takođe žele da usavrše robota. Oni znaju zašto je okvir robota stonoge funkcionalan, ali sada određuju optimalan broj nogu za postizanje kretanja bez osećaja na način koji je isplativ, ali i dalje zadržava prednosti.
„U ovom radu smo pitali: „Kako predviđate minimalni broj nogu za postizanje takvih zadataka?“, rekao je Čong. „Trenutno samo dokazujemo da minimalni broj postoji, ali ne znamo tačan broj nogu?“ potrebna. Nadalje, moramo bolje razumjeti kompromis između energije, brzine, snage i robusnosti u tako složenom sistemu.“


