Životinje su oduvek bile velika inspiracija za robotske sisteme, jer nude fascinantne prirodne primere kako različite strukture tela mogu proizvesti specifične pokrete i stilove kretanja. Dok je većina robota inspirisanih životinjama inspirisana životinjskim vrstama sa nogama, neki robotičari istražuju potencijal robota sa telima koja podsećaju na tela drugih životinja, uključujući zmije.
Roboti inspirisani zmijom imaju jedinstvene karakteristike koje bi ih mogle učiniti pogodnijim od drugih robota za neke tehnološke primene. Na primer, njihovi fleksibilni i zmijski pokreti mogli bi ih učiniti korisnim za izvođenje minimalno invazivnih operacija i endoskopskih intervencija, ulazak u telo pacijenta kroz nos i zatim dostizanje ciljanih oblasti.
Uprkos svojim prednostima, postojeće metode upravljanja ovim robotima iz daljine nisu naročito efikasne. Ovo je prvenstveno zato što su roboti nalik zmiji hiperredundantni (tj. imaju veliki ili beskonačan broj stepena slobode), elektronski uređaji koji se koriste za kontrolu njihovih pokreta često dozvoljavaju korisnicima da odrede samo šest stepeni slobode.
Da bi prevazišao ovo ograničenje, tim istraživača sa Univerziteta Lajbnic u Hanoveru nedavno je razvio novu strategiju za intuitivno i daljinsko upravljanje pokretima hiper-suvišnih robota zmija. Ova strategija, predstavljena u radu koji je prethodno objavljen na arKsiv-u, omogućava korisnicima da promene pokrete i orijentaciju robota nalik zmiju, dok menjaju njegov oblik što je manje moguće.
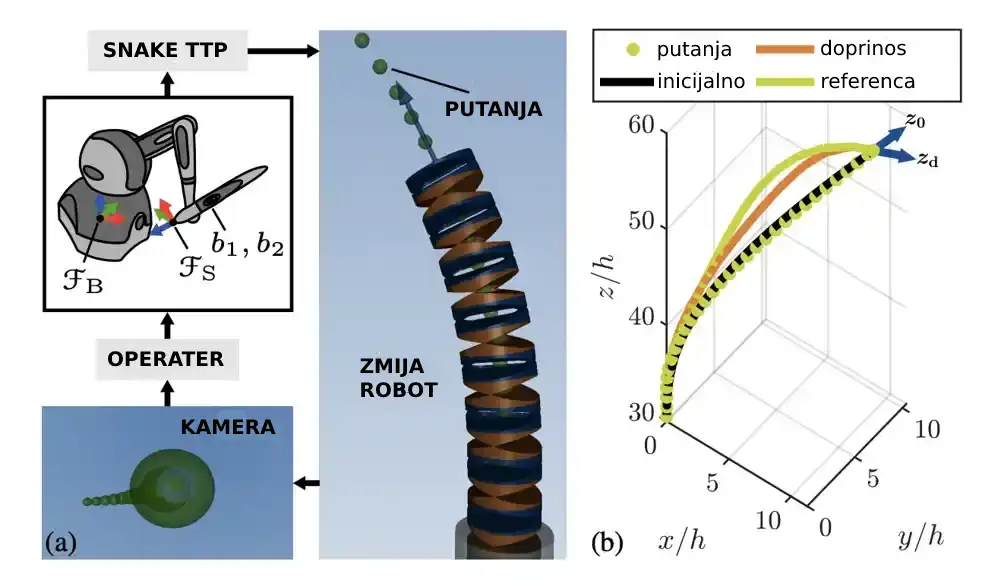
„Ovaj rad predstavlja SnakeTTP, objedinjeni algoritam za intuitivnu telemanipulaciju koji ostvaruje lokomociju i preorijentaciju okreta za endoskopske zadatke“, napisali su Tim-Lukas Habich i njegove kolege u svom radu. „Nova metoda zasnovana na inverznoj kinematici prioriteta zadatka omogućava različite specifikacije položaja i orijentacije sa najvišim prioritetom i uklapanje oblika unutar nultog prostora. Prilagođavanje oblika se vrši maksimiziranjem sličnosti dve krive koristeći Frešeovu distancu dok se istovremeno specificiraju položaj i orijentacija krajnji efektor“.
Habich i njegove kolege su procenili svoj SnakeTTP algoritam tražeći od 14 učesnika studije da kontrolišu pokrete simuliranog robota zmije i dovedu ga do ciljanog područja unutar simuliranog okruženja. Njihovi rezultati su bili veoma obećavajući, jer su korisnici koji kontrolišu simuliranog robota zmije mogli uspešno da završe zadatak lokomocije, a takođe su mogli da preorijentišu pokrete robota unutar ciljne oblasti dok su menjali njegov oblik što je manje moguće.
„Novi pristup prilagođavanju oblika zasnovan na Frechet rastojanju smanjuje grešku oblika do 20,1% za razliku od klasične strategije koja koristi euklidsko rastojanje između trenutne i željene pozicije veze“, napisali su Habich i njegove kolege u svom radu.
Dok je novi kontrolni algoritam koji je uveo ovaj tim istraživača postigao obećavajuće rezultate, do sada je testiran samo na simuliranim robotima. Budući testovi u stvarnom svetu i korišćenje robota pravih zmija mogli bi dodatno potvrditi njegovu efikasnost.
Na kraju, algoritam bi mogao da omogući istraživačima da kontrolišu robote zmije i druge hiper-redundantne robote (na primer, robote inspirisane pipcima hobotnice) sa većom preciznošću, dok takođe bolje repliciraju pokrete nalik zmiji ili pipcima. Ovo bi zauzvrat moglo olakšati primenu ovih robota u medicinskim ustanovama, posebno za izvođenje minimalno invazivnih hirurških procedura unutar ljudskog tela.


