Ruke hobotnice koordiniraju skoro beskonačne stepene slobode za izvođenje složenih pokreta kao što su posezanje, hvatanje, hvatanje, puzanje i plivanje. Kako ove životinje postižu tako širok spektar aktivnosti ostaje izvor misterije, čuđenja i inspiracije. Deo izazova dolazi od zamršene organizacije i biomehanike unutrašnjih mišića.
Ovaj problem je rešen u multidisciplinarnom projektu koji su vodili Prashant Mehta i Mattia Gazzola, profesori mašinskih nauka i inženjerstva na Univerzitetu Ilinois Urbana-Champaign. Kako je objavljeno u Proceedings of the Roial Societi A, dva istraživača i njihove grupe razvili su fiziološki tačan model mišića ruku hobotnice. „Naš model, prvi te vrste, ne samo da pruža uvid u biološki problem, već i okvir za dizajn i kontrolu mekih robota u budućnosti“, rekao je Mehta.
Impresivne mogućnosti krakova hobotnice dugo su služile kao inspiracija za dizajn i kontrolu mekih robota. Takvi mekani roboti imaju potencijal da obavljaju složene zadatke u nestrukturiranim okruženjima dok rade bezbedno oko ljudi, sa primenama u rasponu od poljoprivrede do hirurgije.
Diplomirani student Heng-Sheng Chang, vodeći autor studije, objasnio je da sistemi mekog tela kao što su ruke hobotnice predstavljaju veliki izazov za modeliranje i kontrolu. „Pokreću ih tri glavne unutrašnje mišićne grupe – uzdužna, poprečna i kosa – koje uzrokuju deformaciju ruke na nekoliko načina – šišanje, proširenje, savijanje i uvijanje“, rekao je on. „Ovo daje mekim mišićavim rukama značajnu slobodu, za razliku od njihovih krutih kolega.“
Ključni uvid tima bio je da izrazi muskulaturu ruke koristeći funkciju uskladištene energije, koncept koji je pozajmljen iz teorije mehanike kontinuuma. Postdoktorski naučnik i korespondentni autor Udit Halder objasnio je da „Ruka počiva na minimumu energetskog pejzaža. Mišićne aktivacije modifikuju funkciju uskladištene energije, pomerajući tako ravnotežni položaj ruke i vodeći kretanje.“
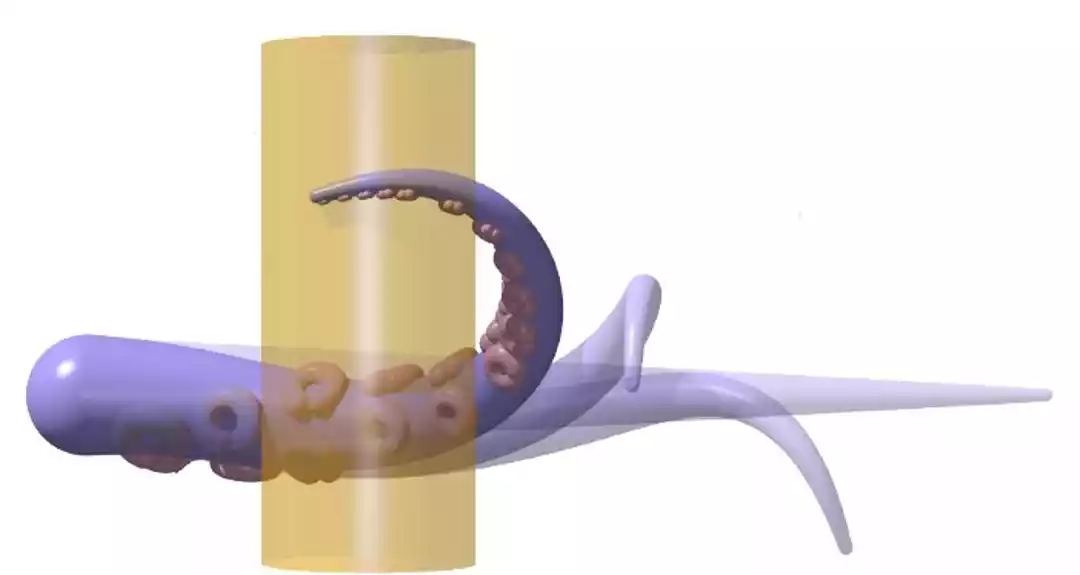
Tumačenje mišića korišćenjem uskladištene energije dramatično pojednostavljuje dizajn kontrole ruke. Konkretno, studija ocrtava metodologiju kontrole oblikovanja energije kako bi se izračunale neophodne mišićne aktivacije za rešavanje zadataka manipulacije kao što su dosezanje i hvatanje. Kada je ovaj pristup numerički demonstriran u softverskom okruženju Elastica, ovaj model je doveo do izuzetno životnog kretanja kada je ruka hobotnice simulirana u tri dimenzije. Štaviše, prema Halderu, „naš rad nudi matematičke garancije performansi koje često nedostaju u alternativnim pristupima, uključujući mašinsko učenje“.
„Naš rad je deo većeg ekosistema tekuće saradnje na Univerzitetu Ilinois“, rekao je Mehta. „Uzvodno, postoje biolozi koji izvode eksperimente na hobotnicama. Nizvodno, postoje robotičari koji uzimaju ove matematičke ideje i primenjuju ih na prave meke robote.“
Grupe Mehte i Gazzole su sarađivale sa Rhanor Gilletteom, profesorom emeritusom molekularne i integrativne fiziologije iz Ilinoisa, kako bi ugradili posmatranu fiziologiju hobotnice u svoj matematički model za ovu studiju. U budućem radu će se raspravljati o biološkim implikacijama kontrole zasnovane na energiji. Pored toga, istraživači sarađuju sa Girishom Krishnanom, profesorom inženjeringa industrijskih i poslovnih sistema iz Ilinoisa, kako bi ugradili svoje matematičke ideje u pravi dizajn i kontrolu mekih robota. Ovo ne samo da će stvoriti sistematski način kontrole mekih robota, već će takođe pružiti dublje razumevanje njihovih mehanizama rada.
Ovaj rad je bio deo projekta CiberOctopus, multidisciplinarne univerzitetske istraživačke inicijative u Koordiniranoj naučnoj laboratoriji Univerziteta Ilinois uz podršku Kancelarije za pomorska istraživanja.


