Tehnološki napredak je otvorio uzbudljive mogućnosti za istraživanje svemira, što bi potencijalno moglo dovesti do novih otkrića o nebeskim telima u našoj galaksiji. Roboti su se pokazali kao posebno obećavajuće oruđe za istraživanje drugih planeta, posebno Marsa, zemaljske planete u Sunčevom sistemu za koju se zna da ima neke slične elemente onima koji se nalaze na Zemlji.
Istraživanje Marsa i njegove površine je fascinantna potraga, jer bi mogla otkriti znake prošlog ili sadašnjeg vanzemaljskog života. Pored potencijalno otkrivanja oblika drevnog mikrobnog života, ova istraživanja bi mogla dovesti do otkrića resursa koji postoje izvan Zemlje, potencijalno otvarajući put budućim ljudskim misijama na Mars.
Istraživači sa Univerziteta za aeronautiku i astronautiku u Nanjingu nedavno su razvili novog četvoronožnog robota inspirisanog gušterima koji bi mogao da pomogne u istraživanju površine crvene planete. Njihov robot, predstavljen u MDPI-jevom časopisu Biomimetics, ima fleksibilnu strukturu tela koja može da replicira pokrete i stil kretanja pustinjskog guštera.
„Da bi se pomoglo ambicioznim misijama na Mars bez posade, razvijeni su specifični tipovi planetarnih rovera za obavljanje zadataka na površini Marsa“, napisali su u svom radu Guangming Čen, Long Ćao, Dženven Džou, Luc Rihter i Ajhong Dži. „Zbog činjenice da je površina sastavljena od zrnastog tla i stena različitih veličina, savremeni roveri mogu imati poteškoća u kretanju po mekim tlima i penjanju preko stena. Da bi se prevazišle te poteškoće, ovo istraživanje razvija četvoronožnog robota koji puže inspirisan lokomocijom. karakteristike pustinjskog guštera“.
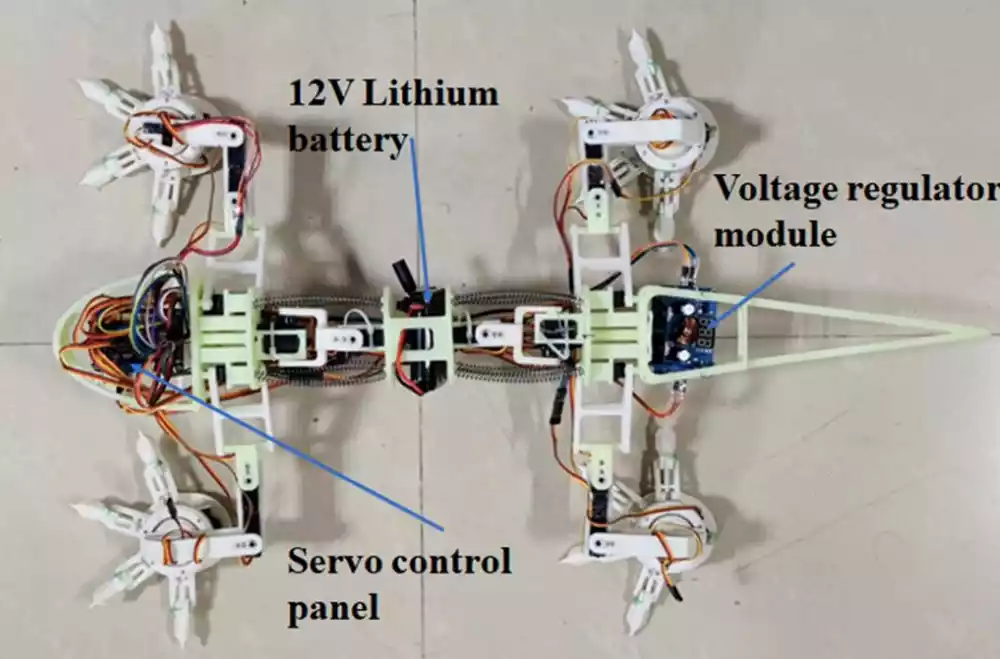
Biomimetički robot koji su kreirali Čen i njegove kolege sastoji se od fleksibilne strukture nalik na kičmu i četiri noge. Da bi se ponovio „puzajući“ pokret tipičan za guštere, svaka noga ima dve šarke i zupčanik koji izaziva ljuljanje.
Svaki od zglobova kuka koji povezuje strukturu kičme sa nogama robota napravljen je od dva serva i mehanizma sa četiri veze koji omogućavaju robotu da se podiže bez gubitka ravnoteže. „Stope“ robota imaju četiri fleksibilna „prsta“, koja se sastoje od dve šarke i kandže.
„Struktura nogu koristi mehanizam sa četiri veze, koji osigurava stabilan pokret podizanja“, objasnili su istraživači u svom radu. „Stopalo se sastoji od aktivnog skočnog zgloba i okruglog jastučića sa četiri fleksibilna prsta koji su efikasni u hvatanju tla i stena.
Da bi ponovili kretanje guštera, istraživači su kreirali niz kinematičkih modela za svaku od komponenti njihovog robota. Zatim su koristili ove modele i numeričke proračune za planiranje kretanja robota.
„Da bi se odredili pokreti robota, uspostavljaju se kinematski modeli koji se odnose na stopalo, nogu i kičmu“, napisali su Čen i njegove kolege u svom radu. „Štaviše, koordinirani pokreti između kičme trupa i nogu su numerički verifikovani.“
Istraživači su prvobitno procenili svog robota u nizu simulacija, kako bi utvrdili da li može efikasno da replicira kretanje guštera. Njihovi rezultati su bili veoma obećavajući, jer su otkrili da njihov robot može da izvodi željene pokrete i stil hoda.
Čen i njegove kolege su već kreirali prototip svog robota koristeći 3D štampane materijale smole, servo kontrolnu tablu, litijumsku bateriju i druge elektronske komponente. Zatim su koristili simulacionu probnu stazu da procene kretanje svog prototipa robota na stenovitim površinama koje podsećaju na teren na Marsu.
Otkrili su da se robot može efikasno kretati u stenovitim sredinama, naglašavajući njegov potencijal za buduće misije na crvenoj planeti. Međutim, pre nego što bude raspoređen i testiran van laboratorije, tim će morati da ga dalje razvije, na primer, dodajući zaštitnu zaptivnu strukturu koja bi ga zaštitila od prašine ili prašine u vazduhu i izgradio njegovo telo koristeći otpornije materijale.
Čen i njegove kolege sada rade na modelima mašinskog učenja koji bi omogućili njihovom robotu da prilagodi svoje pokrete različitim terenima. Pored toga, planiraju da uvedu sistem koji bi obezbedio kontinuirano napajanje robota.